 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDJSCC-Enabled Multi-User Semantic CSI Feedback for Hybrid Beamforming in Dual-Polarized cmWave Massive MIMO
May 19, 2026Driven by the ultra-high throughput requirements of 6G, wireless communications are migrating to centimeter wave (cmWave) bands to overcome the limitations of current spectral resources. Massive multiple-input multiple-output (MIMO) and orthogonal frequency division multiplexing (OFDM) systems aim to achieve high spectral efficiency in cmWave regimes but are often constrained by the heavy overhead of downlink channel state information (CSI) feedback. This paper proposes a deep learning scheme based on the multi-axis multi-layer perceptron for image processing (MAXIM) architecture for joint semantic CSI feedback and hybrid beamforming in multi-user cmWave MIMO-OFDM systems, which maximizes the downlink sum rate by end-to-end optimization. Specifically, distributed encoders at multiple user equipments (UEs) perform limited CSI feedback, while the decoder at the base station (BS) jointly designs the hybrid beamforming matrices without explicit CSI reconstruction. The uplink transmission is implemented via deep joint source-channel coding (DJSCC) to enhance CSI compression efficiency and noise robustness. Furthermore, considering the high correlation between vertical and horizontal polarization channels in dual-polarized massive MIMO systems, a cross-polarization interaction module is introduced at the UEs to exploit polarization correlations for joint CSI compression. Simulation results demonstrate that the proposed method improves the downlink sum rate under various signal-to-noise ratio (SNR) conditions with a limited number of feedback symbols, validating its robustness and superiority in multi-user dual-polarized cmWave MIMO-OFDM systems.
Residual Cross-Attention Transformer-Based Multi-User CSI Feedback with Deep Joint Source-Channel Coding
May 26, 2025This letter proposes a deep-learning (DL)-based multi-user channel state information (CSI) feedback framework for massive multiple-input multiple-output systems, where the deep joint source-channel coding (DJSCC) is utilized to improve the CSI reconstruction accuracy. Specifically, we design a multi-user joint CSI feedback framework, whereby the CSI correlation of nearby users is utilized to reduce the feedback overhead. Under the framework, we propose a new residual cross-attention transformer architecture, which is deployed at the base station to further improve the CSI feedback performance. Moreover, to tackle the "cliff-effect" of conventional bit-level CSI feedback approaches, we integrated DJSCC into the multi-user CSI feedback, together with utilizing a two-stage training scheme to adapt to varying uplink noise levels. Experimental results demonstrate the superiority of our methods in CSI feedback performance, with low network complexity and better scalability.
Use as Many Surrogates as You Want: Selective Ensemble Attack to Unleash Transferability without Sacrificing Resource Efficiency
May 19, 2025In surrogate ensemble attacks, using more surrogate models yields higher transferability but lower resource efficiency. This practical trade-off between transferability and efficiency has largely limited existing attacks despite many pre-trained models are easily accessible online. In this paper, we argue that such a trade-off is caused by an unnecessary common assumption, i.e., all models should be identical across iterations. By lifting this assumption, we can use as many surrogates as we want to unleash transferability without sacrificing efficiency. Concretely, we propose Selective Ensemble Attack (SEA), which dynamically selects diverse models (from easily accessible pre-trained models) across iterations based on our new interpretation of decoupling within-iteration and cross-iteration model diversity.In this way, the number of within-iteration models is fixed for maintaining efficiency, while only cross-iteration model diversity is increased for higher transferability. Experiments on ImageNet demonstrate the superiority of SEA in various scenarios. For example, when dynamically selecting 4 from 20 accessible models, SEA yields 8.5% higher transferability than existing attacks under the same efficiency. The superiority of SEA also generalizes to real-world systems, such as commercial vision APIs and large vision-language models. Overall, SEA opens up the possibility of adaptively balancing transferability and efficiency according to specific resource requirements.
Adversarial example soups: averaging multiple adversarial examples improves transferability without increasing additional generation time
Feb 27, 2024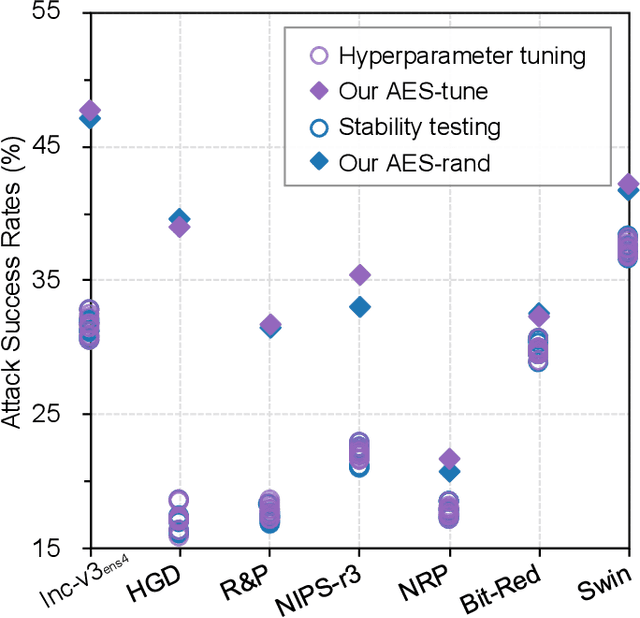



For transfer-based attacks, the adversarial examples are crafted on the surrogate model, which can be implemented to mislead the target model effectively. The conventional method for maximizing adversarial transferability involves: (1) fine-tuning hyperparameters to generate multiple batches of adversarial examples on the substitute model; (2) conserving the batch of adversarial examples that have the best comprehensive performance on substitute model and target model, and discarding the others. In this work, we revisit the second step of this process in the context of fine-tuning hyperparameters to craft adversarial examples, where multiple batches of fine-tuned adversarial examples often appear in a single high error hilltop. We demonstrate that averaging multiple batches of adversarial examples under different hyperparameter configurations, which refers to as "adversarial example soups", can often enhance adversarial transferability. Compared with traditional methods, the proposed method incurs no additional generation time and computational cost. Besides, our method is orthogonal to existing transfer-based methods and can be combined with them seamlessly to generate more transferable adversarial examples. Extensive experiments on the ImageNet dataset show that our methods achieve a higher attack success rate than the state-of-the-art attacks.
Autonomous Electric Vehicle Battery Disassembly Based on NeuroSymbolic Computing
May 16, 2022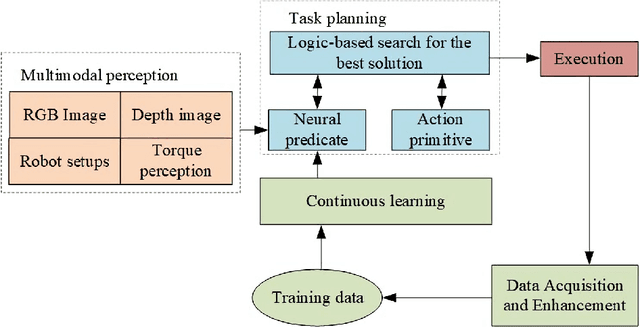
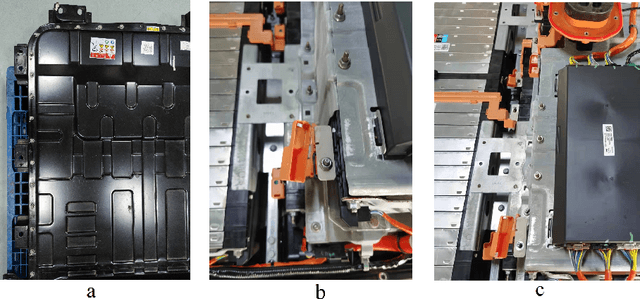
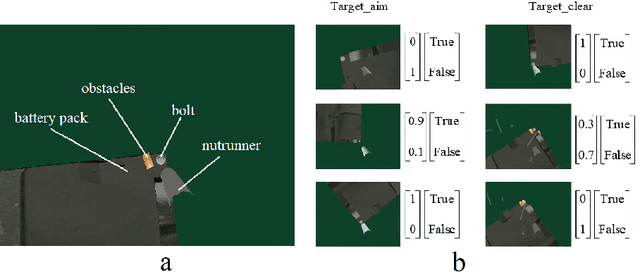
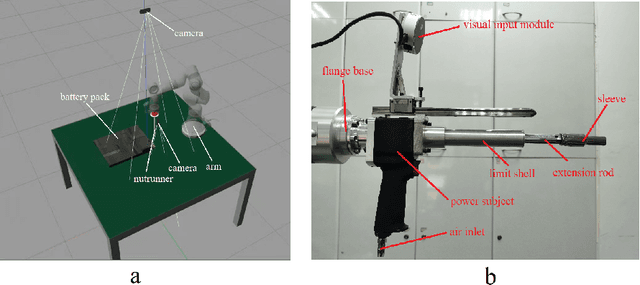
The booming of electric vehicles demands efficient battery disassembly for recycling to be environment-friendly. Due to the unstructured environment and high uncertainties, battery disassembly is still primarily done by humans, probably assisted by robots. It is highly desirable to design autonomous solutions to improve work efficiency and lower human risks in high voltage and toxic environments. This paper proposes a novel framework of the NeuroSymbolic task and motion planning method to disassemble batteries in an unstructured environment using robots automatically. It enables robots to independently locate and disassemble battery bolts, with or without obstacles. This study not only provides a solution for intelligently disassembling electric vehicle batteries but also verifies its feasibility through a set of test results with the robot accomplishing the disassembly tasks in a complex and dynamic environment.
Adversarial example generation with AdaBelief Optimizer and Crop Invariance
Feb 07, 2021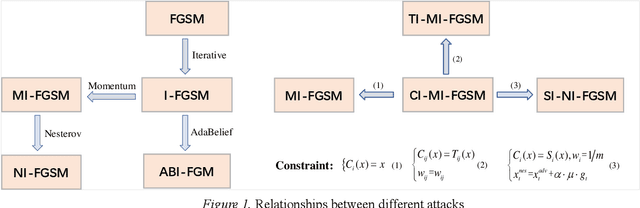

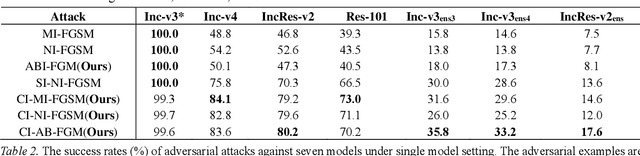

Deep neural networks are vulnerable to adversarial examples, which are crafted by applying small, human-imperceptible perturbations on the original images, so as to mislead deep neural networks to output inaccurate predictions. Adversarial attacks can thus be an important method to evaluate and select robust models in safety-critical applications. However, under the challenging black-box setting, most existing adversarial attacks often achieve relatively low success rates on adversarially trained networks and advanced defense models. In this paper, we propose AdaBelief Iterative Fast Gradient Method (ABI-FGM) and Crop-Invariant attack Method (CIM) to improves the transferability of adversarial examples. ABI-FGM and CIM can be readily integrated to build a strong gradient-based attack to further boost the success rates of adversarial examples for black-box attacks. Moreover, our method can also be naturally combined with other gradient-based attack methods to build a more robust attack to generate more transferable adversarial examples against the defense models. Extensive experiments on the ImageNet dataset demonstrate the method's effectiveness. Whether on adversarially trained networks or advanced defense models, our method has higher success rates than state-of-the-art gradient-based attack methods.
Random Transformation of Image Brightness for Adversarial Attack
Jan 12, 2021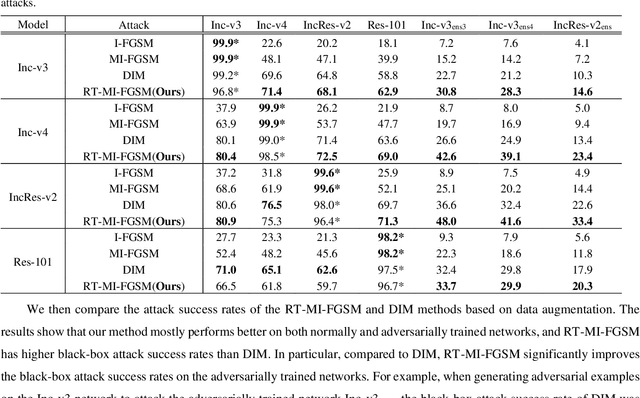
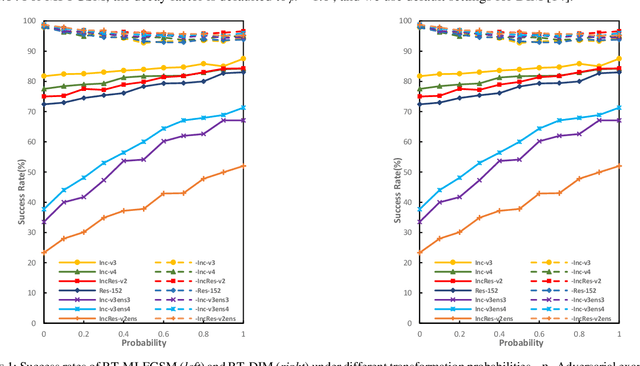
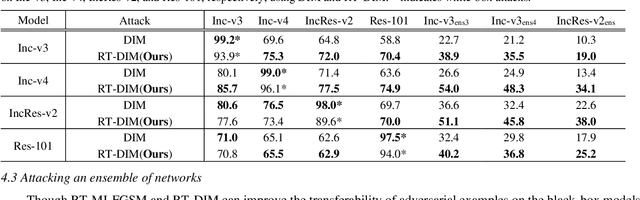
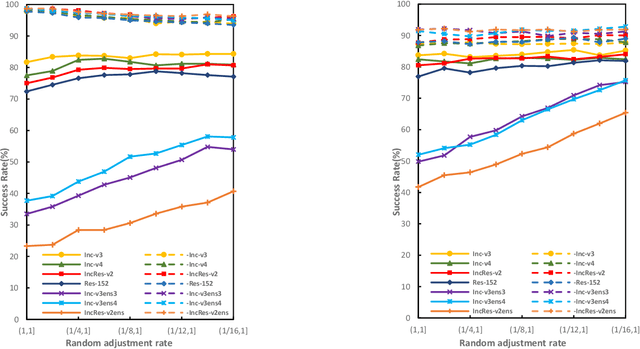
Deep neural networks are vulnerable to adversarial examples, which are crafted by adding small, human-imperceptible perturbations to the original images, but make the model output inaccurate predictions. Before deep neural networks are deployed, adversarial attacks can thus be an important method to evaluate and select robust models in safety-critical applications. However, under the challenging black-box setting, the attack success rate, i.e., the transferability of adversarial examples, still needs to be improved. Based on image augmentation methods, we found that random transformation of image brightness can eliminate overfitting in the generation of adversarial examples and improve their transferability. To this end, we propose an adversarial example generation method based on this phenomenon, which can be integrated with Fast Gradient Sign Method (FGSM)-related methods to build a more robust gradient-based attack and generate adversarial examples with better transferability. Extensive experiments on the ImageNet dataset demonstrate the method's effectiveness. Whether on normally or adversarially trained networks, our method has a higher success rate for black-box attacks than other attack methods based on data augmentation. We hope that this method can help to evaluate and improve the robustness of models.
Improving the Transferability of Adversarial Examples with the Adam Optimizer
Dec 01, 2020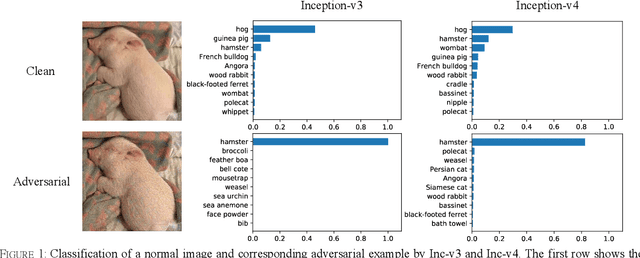
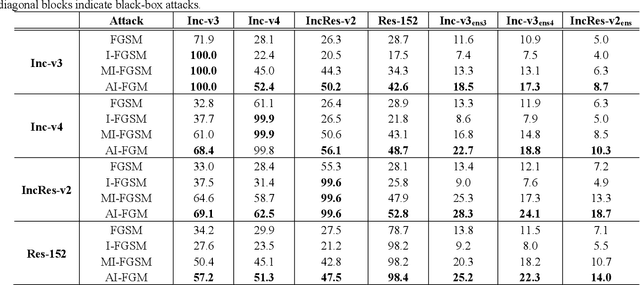
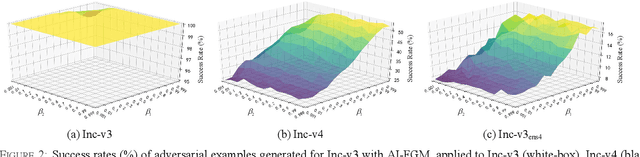
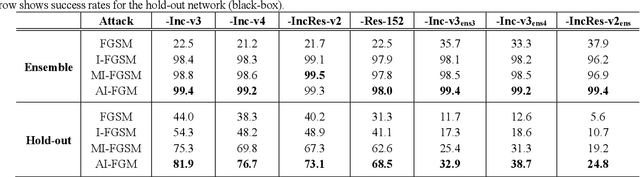
Convolutional neural networks have outperformed humans in image recognition tasks, but they remain vulnerable to attacks from adversarial examples. Since these data are produced by adding imperceptible noise to normal images, their existence poses potential security threats to deep learning systems. Sophisticated adversarial examples with strong attack performance can also be used as a tool to evaluate the robustness of a model. However, the success rate of adversarial attacks remains to be further improved in black-box environments. Therefore, this study combines an improved Adam gradient descent algorithm with the iterative gradient-based attack method. The resulting Adam Iterative Fast Gradient Method is then used to improve the transferability of adversarial examples. Extensive experiments on ImageNet showed that the proposed method offers a higher attack success rate than existing iterative methods. Our best black-box attack achieved a success rate of 81.9% on a normally trained network and 38.7% on an adversarially trained network.