 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRevolutionizing Battery Disassembly: The Design and Implementation of a Battery Disassembly Autonomous Mobile Manipulator Robot(BEAM-1)
Jul 09, 2024



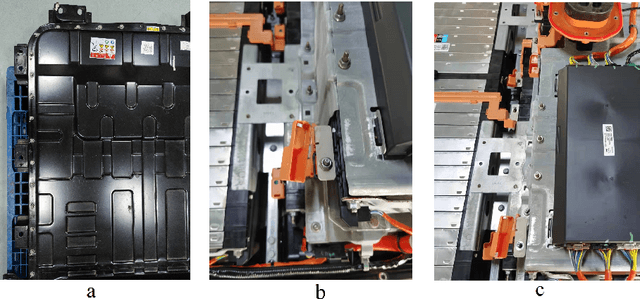
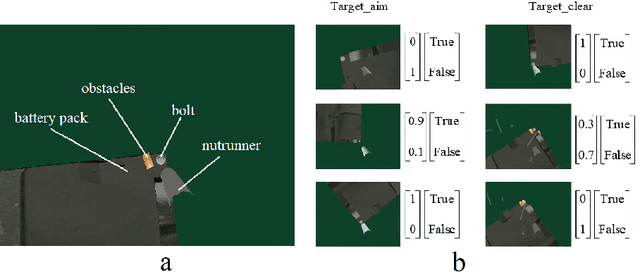
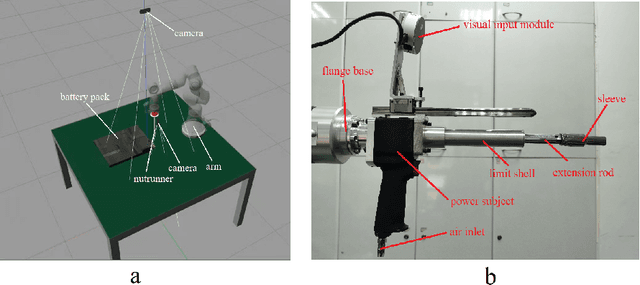
The efficient disassembly of end-of-life electric vehicle batteries(EOL-EVBs) is crucial for green manufacturing and sustainable development. The current pre-programmed disassembly conducted by the Autonomous Mobile Manipulator Robot(AMMR) struggles to meet the disassembly requirements in dynamic environments, complex scenarios, and unstructured processes. In this paper, we propose a Battery Disassembly AMMR(BEAM-1) system based on NeuralSymbolic AI. It detects the environmental state by leveraging a combination of multi-sensors and neural predicates and then translates this information into a quasi-symbolic space. In real-time, it identifies the optimal sequence of action primitives through LLM-heuristic tree search, ensuring high-precision execution of these primitives. Additionally, it employs positional speculative sampling using intuitive networks and achieves the disassembly of various bolt types with a meticulously designed end-effector. Importantly, BEAM-1 is a continuously learning embodied intelligence system capable of subjective reasoning like a human, and possessing intuition. A large number of real scene experiments have proved that it can autonomously perceive, decide, and execute to complete the continuous disassembly of bolts in multiple, multi-category, and complex situations, with a success rate of 98.78%. This research attempts to use NeuroSymbolic AI to give robots real autonomous reasoning, planning, and learning capabilities. BEAM-1 realizes the revolution of battery disassembly. Its framework can be easily ported to any robotic system to realize different application scenarios, which provides a ground-breaking idea for the design and implementation of future embodied intelligent robotic systems.
Towards Agile Robots: Intuitive Robot Position Speculation with Neural Networks
Feb 26, 2024



The robot position speculation, which determines where the chassis should move, is one key step to control the mobile manipulators. The target position must ensure the feasibility of chassis movement and manipulability, which is guaranteed by randomized sampling and kinematic checking in traditional methods. Addressing the demands of agile robotics, this paper proposes a robot position speculation network(RPSN), a learning-based approach to enhance the agility of mobile manipulators. The RPSN incorporates a differentiable inverse kinematic algorithm and a neural network. Through end-to-end training, the RPSN can speculate positions with a high success rate. We apply the RPSN to mobile manipulators disassembling end-of-life electric vehicle batteries (EOL-EVBs). Extensive experiments on various simulated environments and physical mobile manipulators demonstrate that the probability of the initial position provided by RPSN being the ideal position is 96.67%. From the kinematic constraint perspective, it achieves 100% generation of the ideal position on average within 1.28 attempts. Much lower than that of random sampling, 31.04. Moreover, the proposed method demonstrates superior data efficiency over pure neural network approaches. The proposed RPSN enables the robot to quickly infer feasible target positions by intuition. This work moves towards building agile robots that can act swiftly like humans.
Autonomous Electric Vehicle Battery Disassembly Based on NeuroSymbolic Computing
May 16, 2022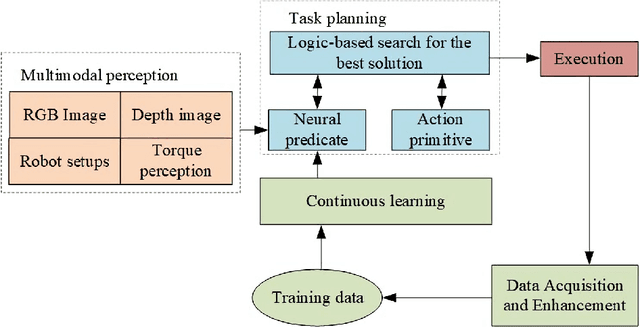
The booming of electric vehicles demands efficient battery disassembly for recycling to be environment-friendly. Due to the unstructured environment and high uncertainties, battery disassembly is still primarily done by humans, probably assisted by robots. It is highly desirable to design autonomous solutions to improve work efficiency and lower human risks in high voltage and toxic environments. This paper proposes a novel framework of the NeuroSymbolic task and motion planning method to disassemble batteries in an unstructured environment using robots automatically. It enables robots to independently locate and disassemble battery bolts, with or without obstacles. This study not only provides a solution for intelligently disassembling electric vehicle batteries but also verifies its feasibility through a set of test results with the robot accomplishing the disassembly tasks in a complex and dynamic environment.