 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTemporal-Consistent Video Restoration with Pre-trained Diffusion Models
Mar 19, 2025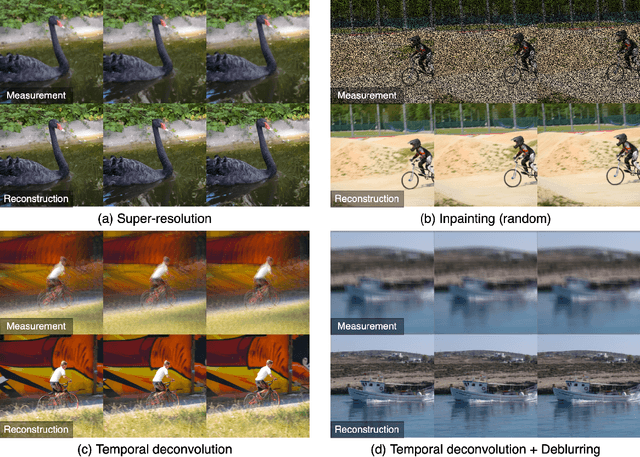
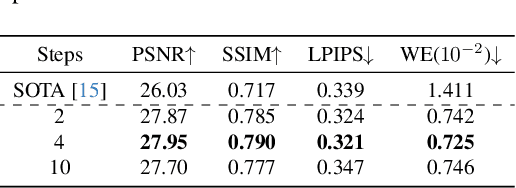
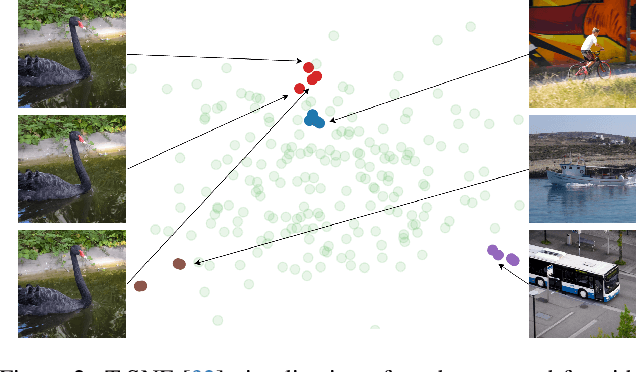
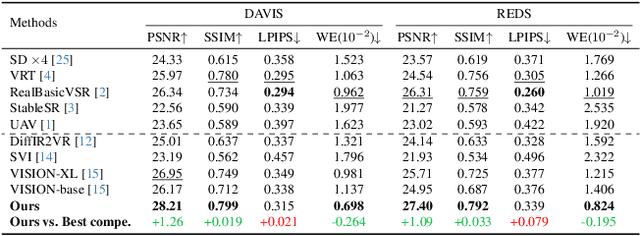
Video restoration (VR) aims to recover high-quality videos from degraded ones. Although recent zero-shot VR methods using pre-trained diffusion models (DMs) show good promise, they suffer from approximation errors during reverse diffusion and insufficient temporal consistency. Moreover, dealing with 3D video data, VR is inherently computationally intensive. In this paper, we advocate viewing the reverse process in DMs as a function and present a novel Maximum a Posterior (MAP) framework that directly parameterizes video frames in the seed space of DMs, eliminating approximation errors. We also introduce strategies to promote bilevel temporal consistency: semantic consistency by leveraging clustering structures in the seed space, and pixel-level consistency by progressive warping with optical flow refinements. Extensive experiments on multiple virtual reality tasks demonstrate superior visual quality and temporal consistency achieved by our method compared to the state-of-the-art.
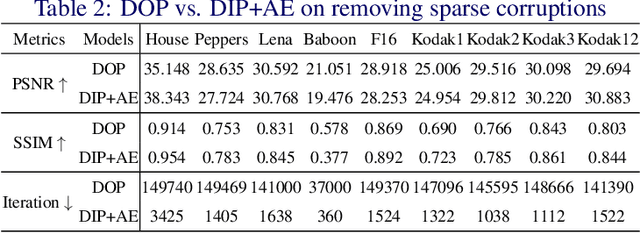
DMPlug: A Plug-in Method for Solving Inverse Problems with Diffusion Models
May 27, 2024



Pretrained diffusion models (DMs) have recently been popularly used in solving inverse problems (IPs). The existing methods mostly interleave iterative steps in the reverse diffusion process and iterative steps to bring the iterates closer to satisfying the measurement constraint. However, such interleaving methods struggle to produce final results that look like natural objects of interest (i.e., manifold feasibility) and fit the measurement (i.e., measurement feasibility), especially for nonlinear IPs. Moreover, their capabilities to deal with noisy IPs with unknown types and levels of measurement noise are unknown. In this paper, we advocate viewing the reverse process in DMs as a function and propose a novel plug-in method for solving IPs using pretrained DMs, dubbed DMPlug. DMPlug addresses the issues of manifold feasibility and measurement feasibility in a principled manner, and also shows great potential for being robust to unknown types and levels of noise. Through extensive experiments across various IP tasks, including two linear and three nonlinear IPs, we demonstrate that DMPlug consistently outperforms state-of-the-art methods, often by large margins especially for nonlinear IPs. The code is available at https://github.com/sun-umn/DMPlug.
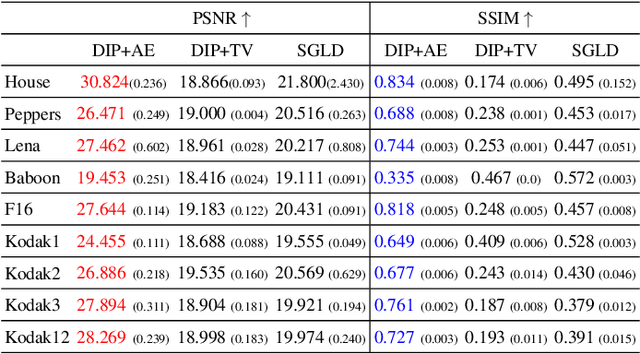
Robust Autoencoders for Collective Corruption Removal
Mar 06, 2023


Robust PCA is a standard tool for learning a linear subspace in the presence of sparse corruption or rare outliers. What about robustly learning manifolds that are more realistic models for natural data, such as images? There have been several recent attempts to generalize robust PCA to manifold settings. In this paper, we propose $\ell_1$- and scaling-invariant $\ell_1/\ell_2$-robust autoencoders based on a surprisingly compact formulation built on the intuition that deep autoencoders perform manifold learning. We demonstrate on several standard image datasets that the proposed formulation significantly outperforms all previous methods in collectively removing sparse corruption, without clean images for training. Moreover, we also show that the learned manifold structures can be generalized to unseen data samples effectively.
Interpretable Deep Learning Methods for Multiview Learning
Feb 15, 2023Technological advances have enabled the generation of unique and complementary types of data or views (e.g. genomics, proteomics, metabolomics) and opened up a new era in multiview learning research with the potential to lead to new biomedical discoveries. We propose iDeepViewLearn (Interpretable Deep Learning Method for Multiview Learning) for learning nonlinear relationships in data from multiple views while achieving feature selection. iDeepViewLearn combines deep learning flexibility with the statistical benefits of data and knowledge-driven feature selection, giving interpretable results. Deep neural networks are used to learn view-independent low-dimensional embedding through an optimization problem that minimizes the difference between observed and reconstructed data, while imposing a regularization penalty on the reconstructed data. The normalized Laplacian of a graph is used to model bilateral relationships between variables in each view, therefore, encouraging selection of related variables. iDeepViewLearn is tested on simulated and two real-world data, including breast cancer-related gene expression and methylation data. iDeepViewLearn had competitive classification results and identified genes and CpG sites that differentiated between individuals who died from breast cancer and those who did not. The results of our real data application and simulations with small to moderate sample sizes suggest that iDeepViewLearn may be a useful method for small-sample-size problems compared to other deep learning methods for multiview learning.
Blind Image Deblurring with Unknown Kernel Size and Substantial Noise
Aug 18, 2022
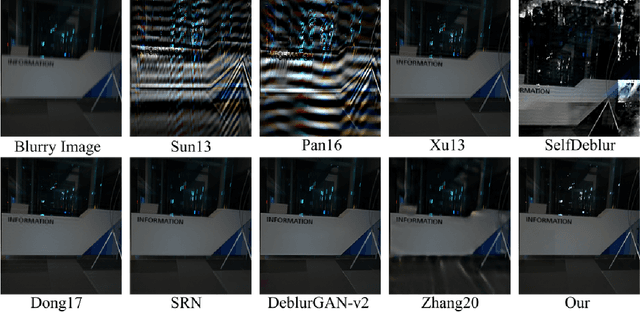
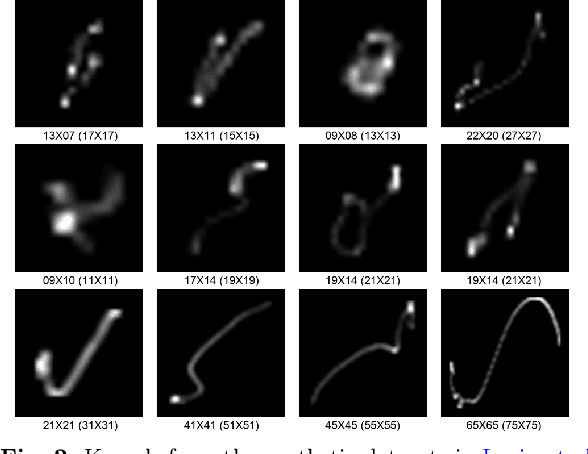
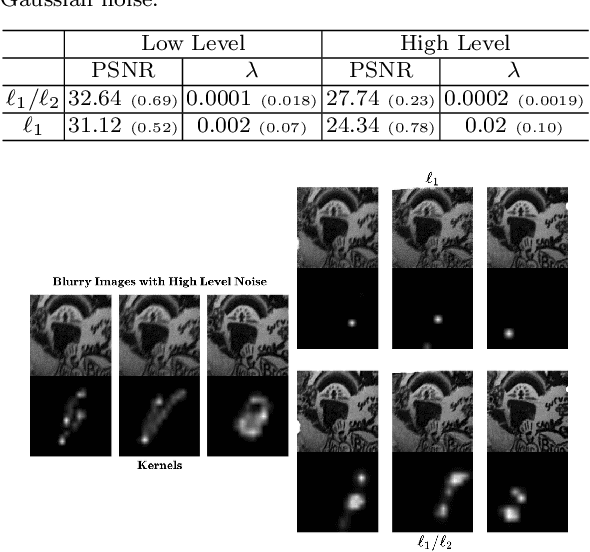
Blind image deblurring (BID) has been extensively studied in computer vision and adjacent fields. Modern methods for BID can be grouped into two categories: single-instance methods that deal with individual instances using statistical inference and numerical optimization, and data-driven methods that train deep-learning models to deblur future instances directly. Data-driven methods can be free from the difficulty in deriving accurate blur models, but are fundamentally limited by the diversity and quality of the training data -- collecting sufficiently expressive and realistic training data is a standing challenge. In this paper, we focus on single-instance methods that remain competitive and indispensable. However, most such methods do not prescribe how to deal with unknown kernel size and substantial noise, precluding practical deployment. Indeed, we show that several state-of-the-art (SOTA) single-instance methods are unstable when the kernel size is overspecified, and/or the noise level is high. On the positive side, we propose a practical BID method that is stable against both, the first of its kind. Our method builds on the recent ideas of solving inverse problems by integrating the physical models and structured deep neural networks, without extra training data. We introduce several crucial modifications to achieve the desired stability. Extensive empirical tests on standard synthetic datasets, as well as real-world NTIRE2020 and RealBlur datasets, show the superior effectiveness and practicality of our BID method compared to SOTA single-instance as well as data-driven methods. The code of our method is available at: \url{https://github.com/sun-umn/Blind-Image-Deblurring}.
Early Stopping for Deep Image Prior
Dec 11, 2021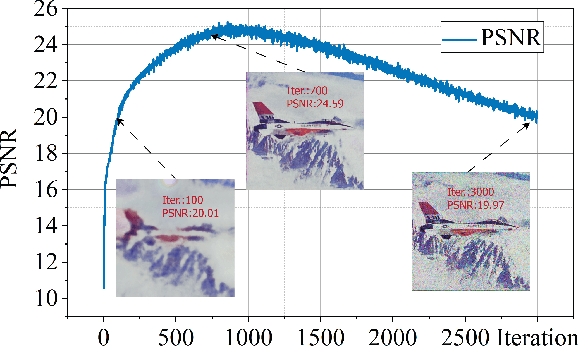
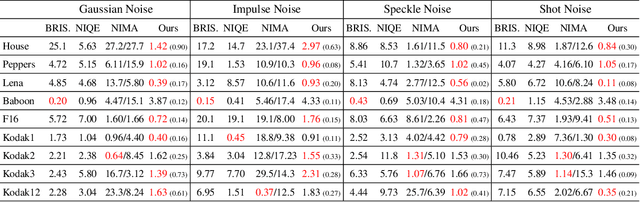
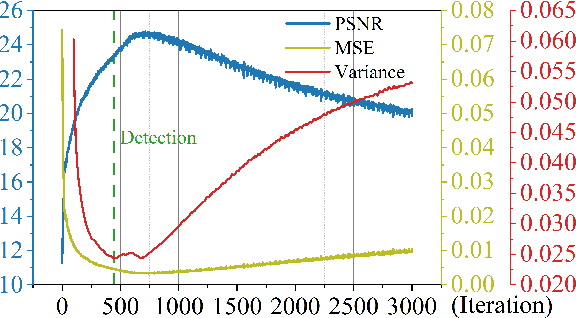
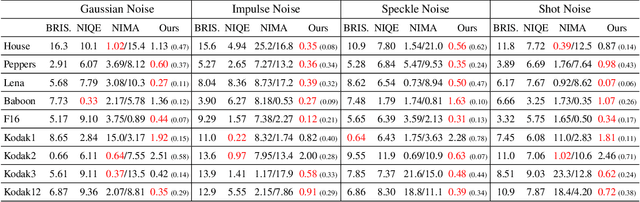
Deep image prior (DIP) and its variants have showed remarkable potential for solving inverse problems in computer vision, without any extra training data. Practical DIP models are often substantially overparameterized. During the fitting process, these models learn mostly the desired visual content first, and then pick up the potential modeling and observational noise, i.e., overfitting. Thus, the practicality of DIP often depends critically on good early stopping (ES) that captures the transition period. In this regard, the majority of DIP works for vision tasks only demonstrates the potential of the models -- reporting the peak performance against the ground truth, but provides no clue about how to operationally obtain near-peak performance without access to the groundtruth. In this paper, we set to break this practicality barrier of DIP, and propose an efficient ES strategy, which consistently detects near-peak performance across several vision tasks and DIP variants. Based on a simple measure of dispersion of consecutive DIP reconstructions, our ES method not only outpaces the existing ones -- which only work in very narrow domains, but also remains effective when combined with a number of methods that try to mitigate the overfitting. The code is available at https://github.com/sun-umn/Early_Stopping_for_DIP.
Self-Validation: Early Stopping for Single-Instance Deep Generative Priors
Oct 23, 2021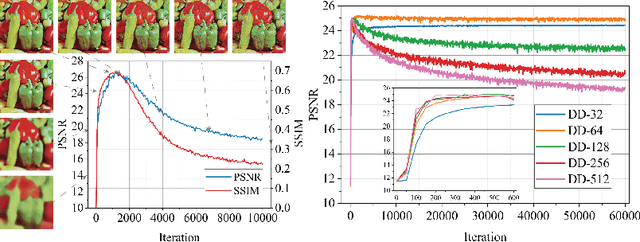
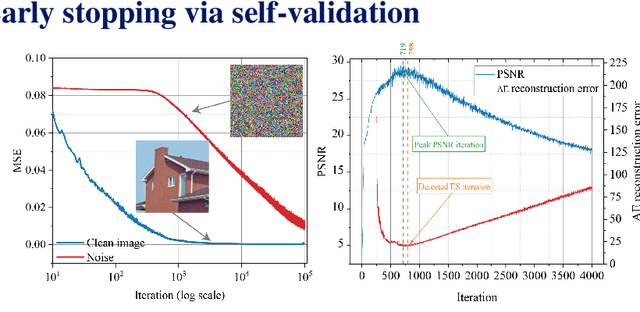
Recent works have shown the surprising effectiveness of deep generative models in solving numerous image reconstruction (IR) tasks, even without training data. We call these models, such as deep image prior and deep decoder, collectively as single-instance deep generative priors (SIDGPs). The successes, however, often hinge on appropriate early stopping (ES), which by far has largely been handled in an ad-hoc manner. In this paper, we propose the first principled method for ES when applying SIDGPs to IR, taking advantage of the typical bell trend of the reconstruction quality. In particular, our method is based on collaborative training and self-validation: the primal reconstruction process is monitored by a deep autoencoder, which is trained online with the historic reconstructed images and used to validate the reconstruction quality constantly. Experimentally, on several IR problems and different SIDGPs, our self-validation method is able to reliably detect near-peak performance and signal good ES points. Our code is available at https://sun-umn.github.io/Self-Validation/.