 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Contextual Runtime Monitors for Safe AI-Based Autonomy
Jan 28, 2026We introduce a novel framework for learning context-aware runtime monitors for AI-based control ensembles. Machine-learning (ML) controllers are increasingly deployed in (autonomous) cyber-physical systems because of their ability to solve complex decision-making tasks. However, their accuracy can degrade sharply in unfamiliar environments, creating significant safety concerns. Traditional ensemble methods aim to improve robustness by averaging or voting across multiple controllers, yet this often dilutes the specialized strengths that individual controllers exhibit in different operating contexts. We argue that, rather than blending controller outputs, a monitoring framework should identify and exploit these contextual strengths. In this paper, we reformulate the design of safe AI-based control ensembles as a contextual monitoring problem. A monitor continuously observes the system's context and selects the controller best suited to the current conditions. To achieve this, we cast monitor learning as a contextual learning task and draw on techniques from contextual multi-armed bandits. Our approach comes with two key benefits: (1) theoretical safety guarantees during controller selection, and (2) improved utilization of controller diversity. We validate our framework in two simulated autonomous driving scenarios, demonstrating significant improvements in both safety and performance compared to non-contextual baselines.
Locally Pareto-Optimal Interpretations for Black-Box Machine Learning Models
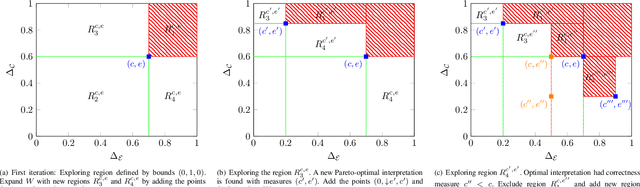
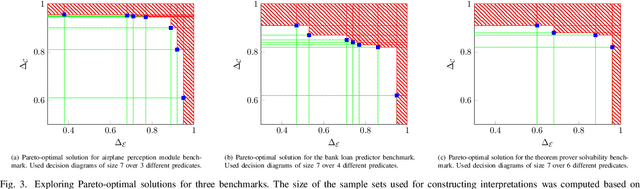
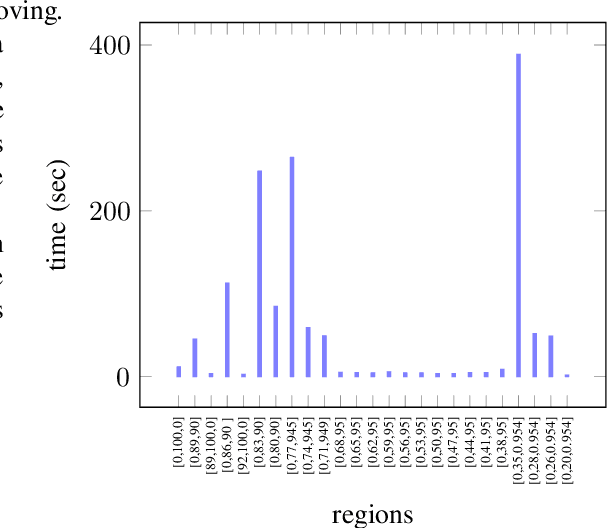
Aug 21, 2025Creating meaningful interpretations for black-box machine learning models involves balancing two often conflicting objectives: accuracy and explainability. Exploring the trade-off between these objectives is essential for developing trustworthy interpretations. While many techniques for multi-objective interpretation synthesis have been developed, they typically lack formal guarantees on the Pareto-optimality of the results. Methods that do provide such guarantees, on the other hand, often face severe scalability limitations when exploring the Pareto-optimal space. To address this, we develop a framework based on local optimality guarantees that enables more scalable synthesis of interpretations. Specifically, we consider the problem of synthesizing a set of Pareto-optimal interpretations with local optimality guarantees, within the immediate neighborhood of each solution. Our approach begins with a multi-objective learning or search technique, such as Multi-Objective Monte Carlo Tree Search, to generate a best-effort set of Pareto-optimal candidates with respect to accuracy and explainability. We then verify local optimality for each candidate as a Boolean satisfiability problem, which we solve using a SAT solver. We demonstrate the efficacy of our approach on a set of benchmarks, comparing it against previous methods for exploring the Pareto-optimal front of interpretations. In particular, we show that our approach yields interpretations that closely match those synthesized by methods offering global guarantees.
Metric-Guided Synthesis of Class Activation Mapping
Apr 14, 2025Class activation mapping (CAM) is a widely adopted class of saliency methods used to explain the behavior of convolutional neural networks (CNNs). These methods generate heatmaps that highlight the parts of the input most relevant to the CNN output. Various CAM methods have been proposed, each distinguished by the expressions used to derive heatmaps. In general, users look for heatmaps with specific properties that reflect different aspects of CNN functionality. These may include similarity to ground truth, robustness, equivariance, and more. Although existing CAM methods implicitly encode some of these properties in their expressions, they do not allow for variability in heatmap generation following the user's intent or domain knowledge. In this paper, we address this limitation by introducing SyCAM, a metric-based approach for synthesizing CAM expressions. Given a predefined evaluation metric for saliency maps, SyCAM automatically generates CAM expressions optimized for that metric. We specifically explore a syntax-guided synthesis instantiation of SyCAM, where CAM expressions are derived based on predefined syntactic constraints and the given metric. Using several established evaluation metrics, we demonstrate the efficacy and flexibility of our approach in generating targeted heatmaps. We compare SyCAM with other well-known CAM methods on three prominent models: ResNet50, VGG16, and VGG19.
Synthesizing Pareto-Optimal Interpretations for Black-Box Models
Aug 16, 2021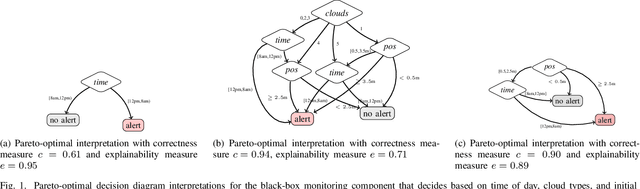
We present a new multi-objective optimization approach for synthesizing interpretations that "explain" the behavior of black-box machine learning models. Constructing human-understandable interpretations for black-box models often requires balancing conflicting objectives. A simple interpretation may be easier to understand for humans while being less precise in its predictions vis-a-vis a complex interpretation. Existing methods for synthesizing interpretations use a single objective function and are often optimized for a single class of interpretations. In contrast, we provide a more general and multi-objective synthesis framework that allows users to choose (1) the class of syntactic templates from which an interpretation should be synthesized, and (2) quantitative measures on both the correctness and explainability of an interpretation. For a given black-box, our approach yields a set of Pareto-optimal interpretations with respect to the correctness and explainability measures. We show that the underlying multi-objective optimization problem can be solved via a reduction to quantitative constraint solving, such as weighted maximum satisfiability. To demonstrate the benefits of our approach, we have applied it to synthesize interpretations for black-box neural-network classifiers. Our experiments show that there often exists a rich and varied set of choices for interpretations that are missed by existing approaches.
Runtime Monitoring for Markov Decision Processes
May 26, 2021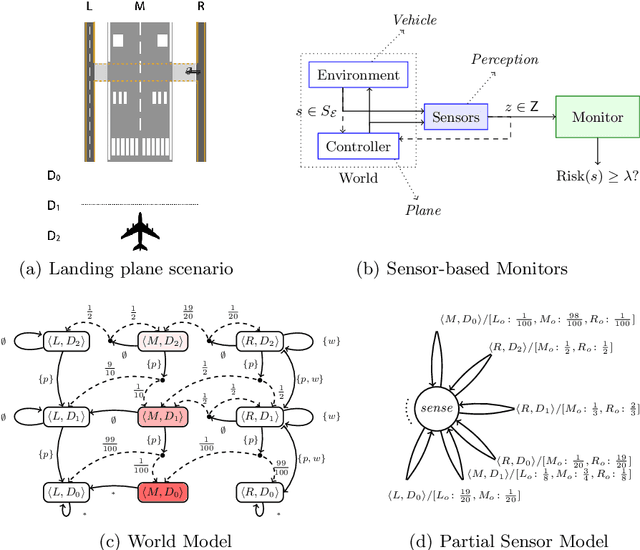
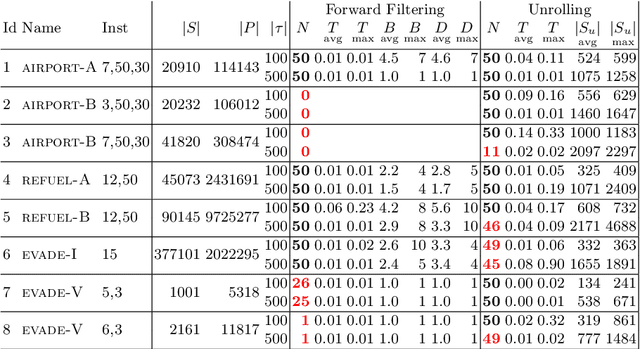
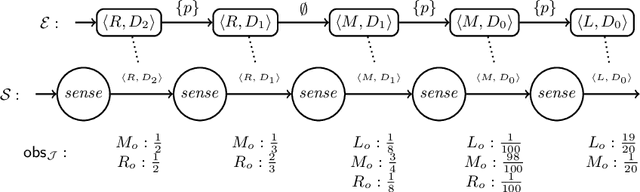
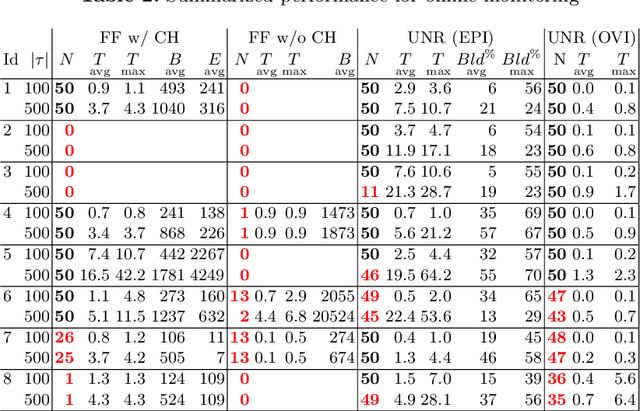
We investigate the problem of monitoring partially observable systems with nondeterministic and probabilistic dynamics. In such systems, every state may be associated with a risk, e.g., the probability of an imminent crash. During runtime, we obtain partial information about the system state in form of observations. The monitor uses this information to estimate the risk of the (unobservable) current system state. Our results are threefold. First, we show that extensions of state estimation approaches do not scale due the combination of nondeterminism and probabilities. While convex hull algorithms improve the practical runtime, they do not prevent an exponential memory blowup. Second, we present a tractable algorithm based on model checking conditional reachability probabilities. Third, we provide prototypical implementations and manifest the applicability of our algorithms to a range of benchmarks. The results highlight the possibilities and boundaries of our novel algorithms.
SOTER on ROS: A Run-Time Assurance Framework on the Robot Operating System
Aug 21, 2020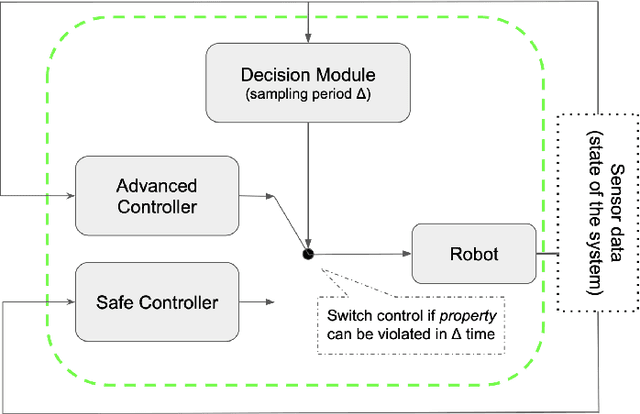
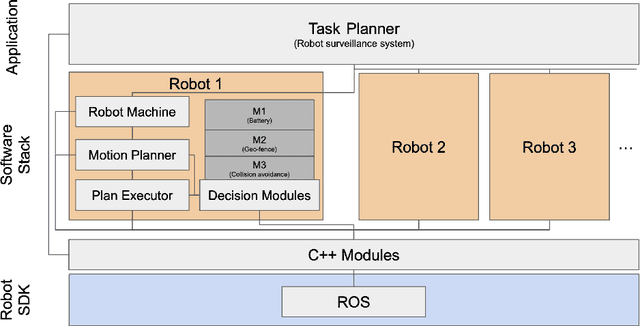
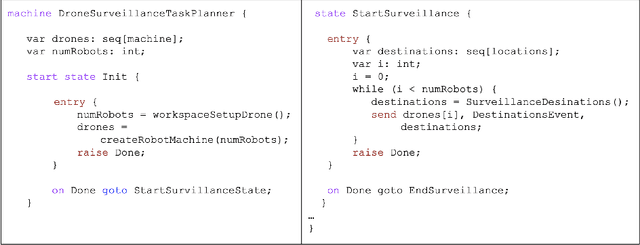
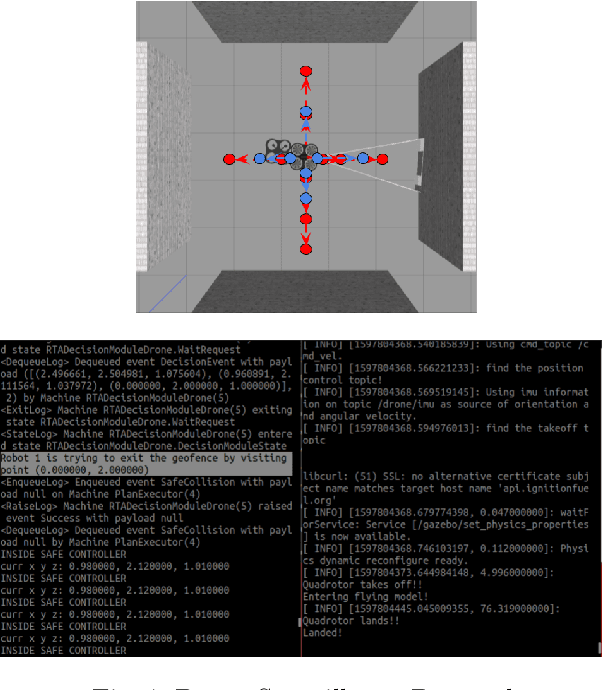
We present an implementation of SOTER, a run-time assurance framework for building safe distributed mobile robotic (DMR) systems, on top of the Robot Operating System (ROS). The safety of DMR systems cannot always be guaranteed at design time, especially when complex, off-the-shelf components are used that cannot be verified easily. SOTER addresses this by providing a language-based approach for run-time assurance for DMR systems. SOTER implements the reactive robotic software using the language P, a domain-specific language designed for implementing asynchronous event-driven systems, along with an integrated run-time assurance system that allows programmers to use unfortified components but still provide safety guarantees. We describe an implementation of SOTER for ROS and demonstrate its efficacy using a multi-robot surveillance case study, with multiple run-time assurance modules. Through rigorous simulation, we show that SOTER enabled systems ensure safety, even when using unknown and untrusted components.
The Challenges in Specifying and Explaining Synthesized Implementations of Reactive Systems
Jan 03, 2019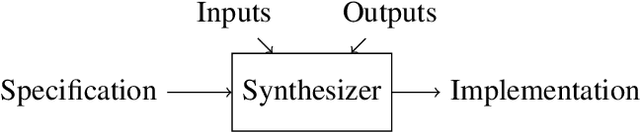
In formal synthesis of reactive systems an implementation of a system is automatically constructed from its formal specification. The great advantage of synthesis is that the resulting implementation is correct by construction; therefore there is no need for manual programming and tedious debugging tasks. Developers remain, nevertheless, hesitant to using automatic synthesis tools and still favor manually writing code. A common argument against synthesis is that the resulting implementation does not always give a clear picture on what decisions were made during the synthesis process. The outcome of synthesis tools is mostly unreadable and hinders the developer from understanding the functionality of the resulting implementation. Many attempts have been made in the last years to make the synthesis process more transparent to users. Either by structuring the outcome of synthesis tools or by providing additional automated support to help users with the specification process. In this paper we discuss the challenges in writing specifications for reactive systems and give a survey on what tools have been developed to guide users in specifying reactive systems and understanding the outcome of synthesis tools.
* In Proceedings CREST 2018, arXiv:1901.00073
Synthesizing Skeletons for Reactive Systems
Mar 25, 2018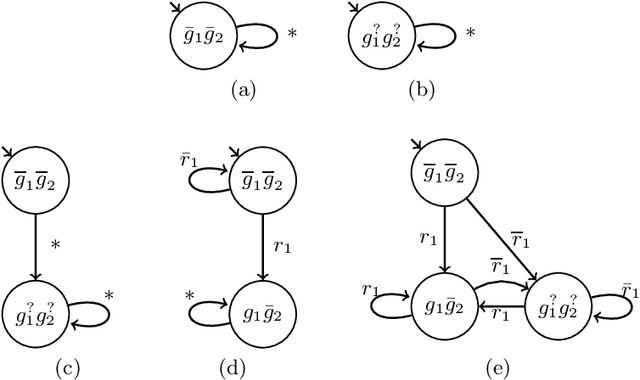
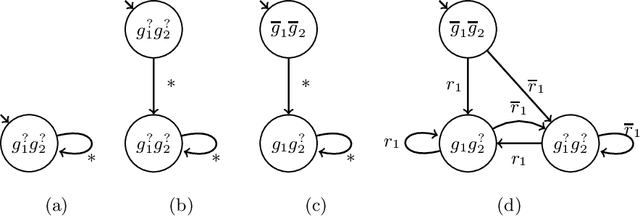
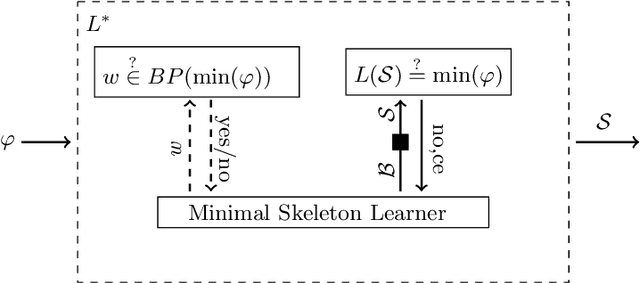
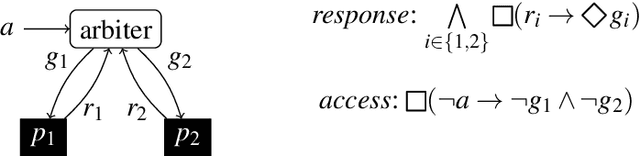
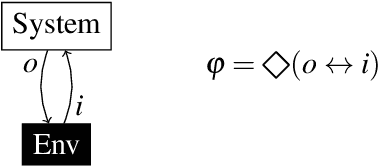
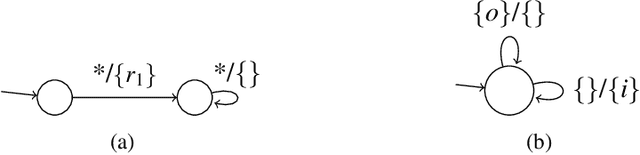
We present an analysis technique for temporal specifications of reactive systems that identifies, on the level of individual system outputs over time, which parts of the implementation are determined by the specification, and which parts are still open. This information is represented in the form of a labeled transition system, which we call skeleton. Each state of the skeleton is labeled with a three-valued assignment to the output variables: each output can be true, false, or open, where true or false means that the value must be true or false, respectively, and open means that either value is still possible. We present algorithms for the verification of skeletons and for the learning-based synthesis of skeletons from specifications in linear-time temporal logic (LTL). The algorithm returns a skeleton that satisfies the given LTL specification in time polynomial in the size of the minimal skeleton. Our new analysis technique can be used to recognize and repair specifications that underspecify critical situations. The technique thus complements existing methods for the recognition and repair of overspecifications via the identification of unrealizable cores.