 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Contextual Runtime Monitors for Safe AI-Based Autonomy
Jan 28, 2026We introduce a novel framework for learning context-aware runtime monitors for AI-based control ensembles. Machine-learning (ML) controllers are increasingly deployed in (autonomous) cyber-physical systems because of their ability to solve complex decision-making tasks. However, their accuracy can degrade sharply in unfamiliar environments, creating significant safety concerns. Traditional ensemble methods aim to improve robustness by averaging or voting across multiple controllers, yet this often dilutes the specialized strengths that individual controllers exhibit in different operating contexts. We argue that, rather than blending controller outputs, a monitoring framework should identify and exploit these contextual strengths. In this paper, we reformulate the design of safe AI-based control ensembles as a contextual monitoring problem. A monitor continuously observes the system's context and selects the controller best suited to the current conditions. To achieve this, we cast monitor learning as a contextual learning task and draw on techniques from contextual multi-armed bandits. Our approach comes with two key benefits: (1) theoretical safety guarantees during controller selection, and (2) improved utilization of controller diversity. We validate our framework in two simulated autonomous driving scenarios, demonstrating significant improvements in both safety and performance compared to non-contextual baselines.
Metric-Guided Synthesis of Class Activation Mapping
Apr 14, 2025Class activation mapping (CAM) is a widely adopted class of saliency methods used to explain the behavior of convolutional neural networks (CNNs). These methods generate heatmaps that highlight the parts of the input most relevant to the CNN output. Various CAM methods have been proposed, each distinguished by the expressions used to derive heatmaps. In general, users look for heatmaps with specific properties that reflect different aspects of CNN functionality. These may include similarity to ground truth, robustness, equivariance, and more. Although existing CAM methods implicitly encode some of these properties in their expressions, they do not allow for variability in heatmap generation following the user's intent or domain knowledge. In this paper, we address this limitation by introducing SyCAM, a metric-based approach for synthesizing CAM expressions. Given a predefined evaluation metric for saliency maps, SyCAM automatically generates CAM expressions optimized for that metric. We specifically explore a syntax-guided synthesis instantiation of SyCAM, where CAM expressions are derived based on predefined syntactic constraints and the given metric. Using several established evaluation metrics, we demonstrate the efficacy and flexibility of our approach in generating targeted heatmaps. We compare SyCAM with other well-known CAM methods on three prominent models: ResNet50, VGG16, and VGG19.
Dynamic Price of Parking Service based on Deep Learning
Jan 11, 2022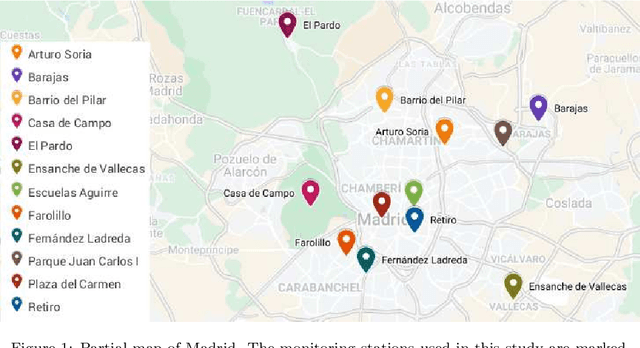
The improvement of air-quality in urban areas is one of the main concerns of public government bodies. This concern emerges from the evidence between the air quality and the public health. Major efforts from government bodies in this area include monitoring and forecasting systems, banning more pollutant motor vehicles, and traffic limitations during the periods of low-quality air. In this work, a proposal for dynamic prices in regulated parking services is presented. The dynamic prices in parking service must discourage motor vehicles parking when low-quality episodes are predicted. For this purpose, diverse deep learning strategies are evaluated. They have in common the use of collective air-quality measurements for forecasting labels about air quality in the city. The proposal is evaluated by using economic parameters and deep learning quality criteria at Madrid (Spain).