 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSOTER on ROS: A Run-Time Assurance Framework on the Robot Operating System
Aug 21, 2020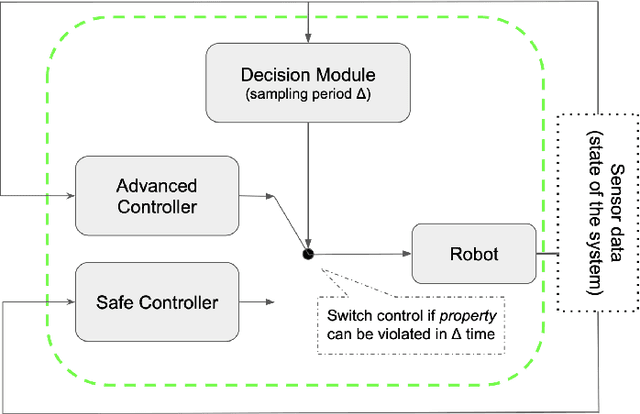
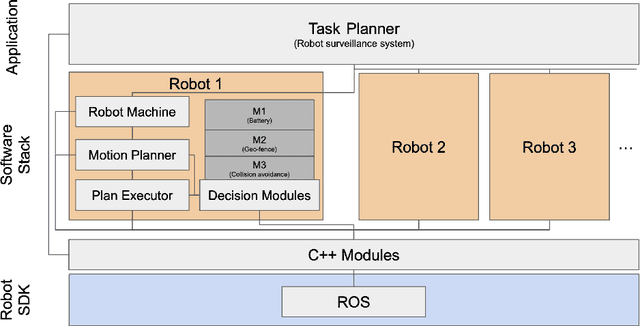
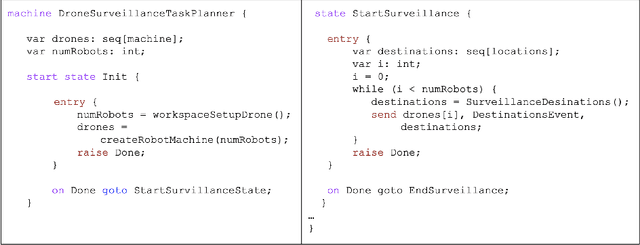
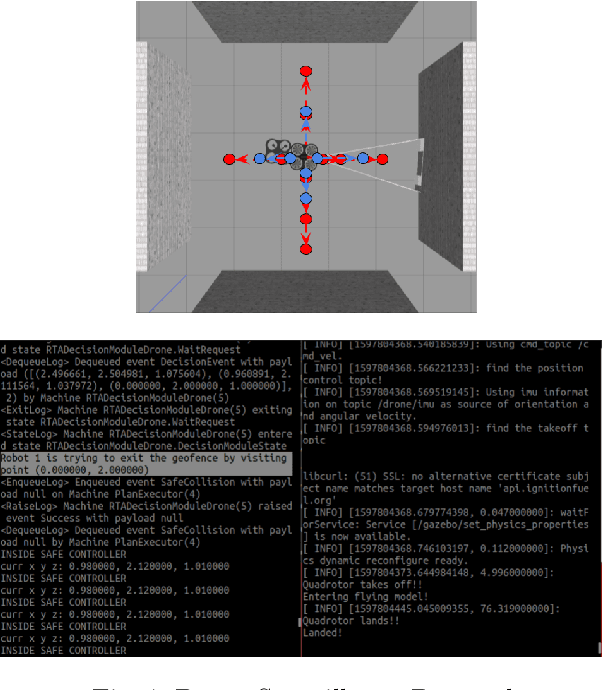
We present an implementation of SOTER, a run-time assurance framework for building safe distributed mobile robotic (DMR) systems, on top of the Robot Operating System (ROS). The safety of DMR systems cannot always be guaranteed at design time, especially when complex, off-the-shelf components are used that cannot be verified easily. SOTER addresses this by providing a language-based approach for run-time assurance for DMR systems. SOTER implements the reactive robotic software using the language P, a domain-specific language designed for implementing asynchronous event-driven systems, along with an integrated run-time assurance system that allows programmers to use unfortified components but still provide safety guarantees. We describe an implementation of SOTER for ROS and demonstrate its efficacy using a multi-robot surveillance case study, with multiple run-time assurance modules. Through rigorous simulation, we show that SOTER enabled systems ensure safety, even when using unknown and untrusted components.
SOTER: Programming Safe Robotics System using Runtime Assurance
Feb 11, 2019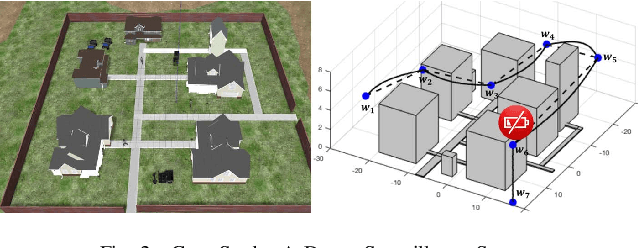
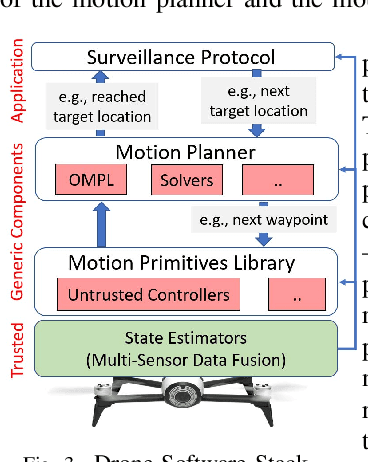
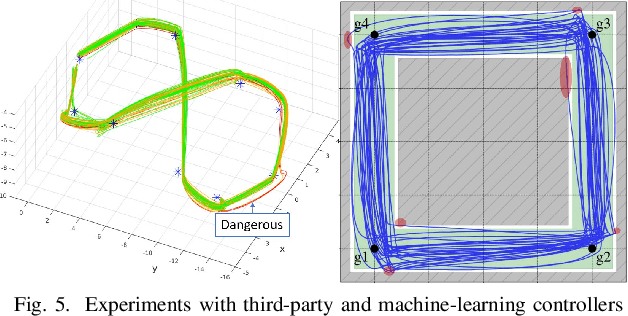
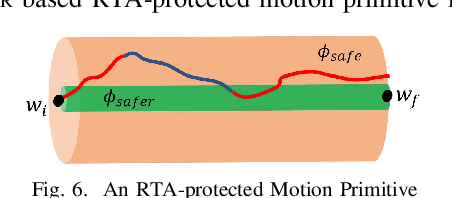
The recent drive towards achieving greater autonomy and intelligence in robotics has led to high levels of complexity. Autonomous robots increasingly depend on third party off-the-shelf components and complex machine-learning techniques. This trend makes it challenging to provide strong design-time certification of correct operation. To address these challenges, we present SOTER, a robotics programming framework with two key components: (1) a programming language for implementing and testing high-level reactive robotics software and (2) an integrated runtime assurance (RTA) system that helps enable the use of uncertified components, while still providing safety guarantees. SOTER provides language primitives to declaratively construct a RTA module consisting of an advanced, high-performance controller (uncertified), a safe, lower-performance controller (certified), and the desired safety specification. The framework provides a formal guarantee that a well-formed RTA module always satisfies the safety specification, without completely sacrificing performance by using higher performance uncertified components whenever safe. SOTER allows the complex robotics software stack to be constructed as a composition of RTA modules, where each uncertified component is protected using a RTA module. To demonstrate the efficacy of our framework, we consider a real-world case-study of building a safe drone surveillance system. Our experiments both in simulation and on actual drones show that the SOTER-enabled RTA ensures the safety of the system, including when untrusted third-party components have bugs or deviate from the desired behavior.