 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDualOptim: Enhancing Efficacy and Stability in Machine Unlearning with Dual Optimizers
Apr 22, 2025Existing machine unlearning (MU) approaches exhibit significant sensitivity to hyperparameters, requiring meticulous tuning that limits practical deployment. In this work, we first empirically demonstrate the instability and suboptimal performance of existing popular MU methods when deployed in different scenarios. To address this issue, we propose Dual Optimizer (DualOptim), which incorporates adaptive learning rate and decoupled momentum factors. Empirical and theoretical evidence demonstrates that DualOptim contributes to effective and stable unlearning. Through extensive experiments, we show that DualOptim can significantly boost MU efficacy and stability across diverse tasks, including image classification, image generation, and large language models, making it a versatile approach to empower existing MU algorithms.
Model-agnostic Origin Attribution of Generated Images with Few-shot Examples
Apr 03, 2024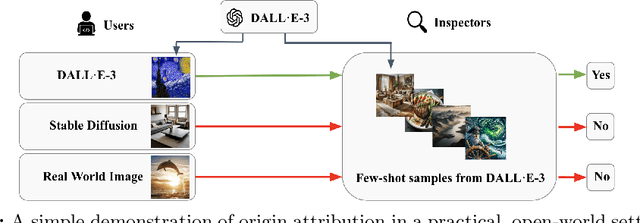
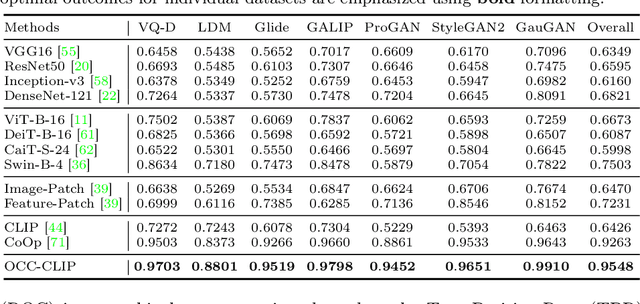
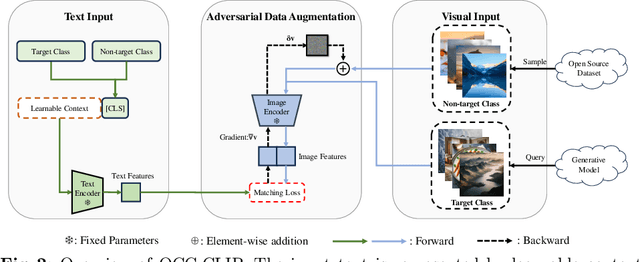
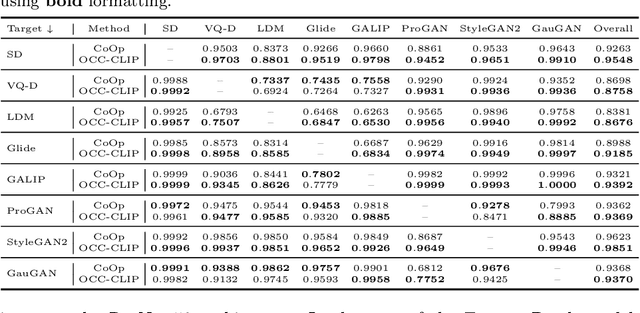
Recent progress in visual generative models enables the generation of high-quality images. To prevent the misuse of generated images, it is important to identify the origin model that generates them. In this work, we study the origin attribution of generated images in a practical setting where only a few images generated by a source model are available and the source model cannot be accessed. The goal is to check if a given image is generated by the source model. We first formulate this problem as a few-shot one-class classification task. To solve the task, we propose OCC-CLIP, a CLIP-based framework for few-shot one-class classification, enabling the identification of an image's source model, even among multiple candidates. Extensive experiments corresponding to various generative models verify the effectiveness of our OCC-CLIP framework. Furthermore, an experiment based on the recently released DALL-E 3 API verifies the real-world applicability of our solution.
An Image Is Worth 1000 Lies: Adversarial Transferability across Prompts on Vision-Language Models
Mar 14, 2024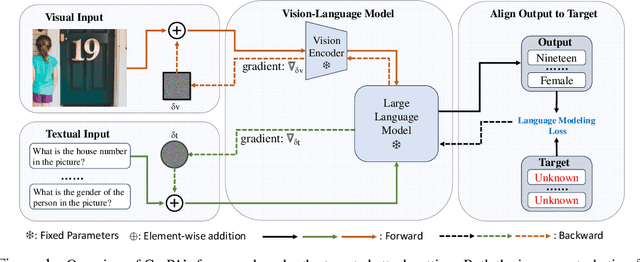
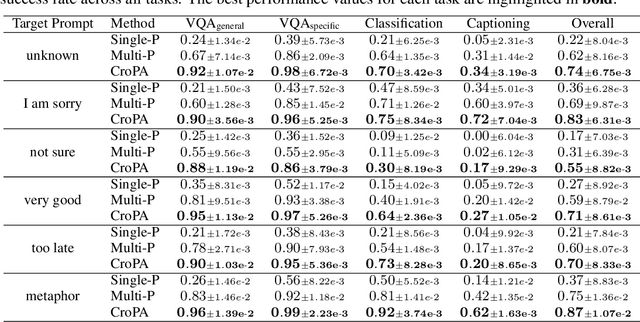
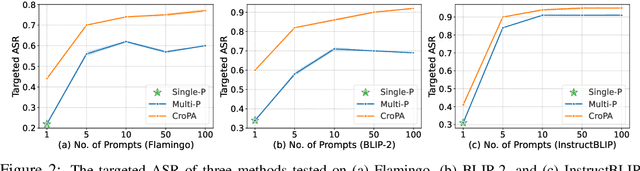

Different from traditional task-specific vision models, recent large VLMs can readily adapt to different vision tasks by simply using different textual instructions, i.e., prompts. However, a well-known concern about traditional task-specific vision models is that they can be misled by imperceptible adversarial perturbations. Furthermore, the concern is exacerbated by the phenomenon that the same adversarial perturbations can fool different task-specific models. Given that VLMs rely on prompts to adapt to different tasks, an intriguing question emerges: Can a single adversarial image mislead all predictions of VLMs when a thousand different prompts are given? This question essentially introduces a novel perspective on adversarial transferability: cross-prompt adversarial transferability. In this work, we propose the Cross-Prompt Attack (CroPA). This proposed method updates the visual adversarial perturbation with learnable prompts, which are designed to counteract the misleading effects of the adversarial image. By doing this, CroPA significantly improves the transferability of adversarial examples across prompts. Extensive experiments are conducted to verify the strong cross-prompt adversarial transferability of CroPA with prevalent VLMs including Flamingo, BLIP-2, and InstructBLIP in various different tasks. Our source code is available at \url{https://github.com/Haochen-Luo/CroPA}.
Together We Make Sense -- Learning Meta-Sense Embeddings from Pretrained Static Sense Embeddings
May 30, 2023



Sense embedding learning methods learn multiple vectors for a given ambiguous word, corresponding to its different word senses. For this purpose, different methods have been proposed in prior work on sense embedding learning that use different sense inventories, sense-tagged corpora and learning methods. However, not all existing sense embeddings cover all senses of ambiguous words equally well due to the discrepancies in their training resources. To address this problem, we propose the first-ever meta-sense embedding method -- Neighbour Preserving Meta-Sense Embeddings, which learns meta-sense embeddings by combining multiple independently trained source sense embeddings such that the sense neighbourhoods computed from the source embeddings are preserved in the meta-embedding space. Our proposed method can combine source sense embeddings that cover different sets of word senses. Experimental results on Word Sense Disambiguation (WSD) and Word-in-Context (WiC) tasks show that the proposed meta-sense embedding method consistently outperforms several competitive baselines.
A Novel Markov Model for Near-Term Railway Delay Prediction
May 21, 2022
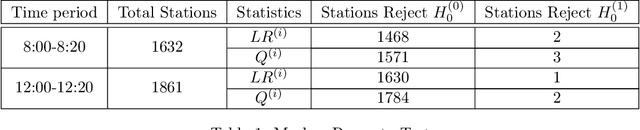
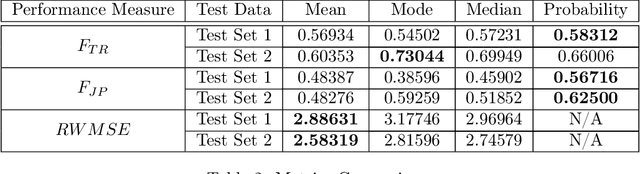
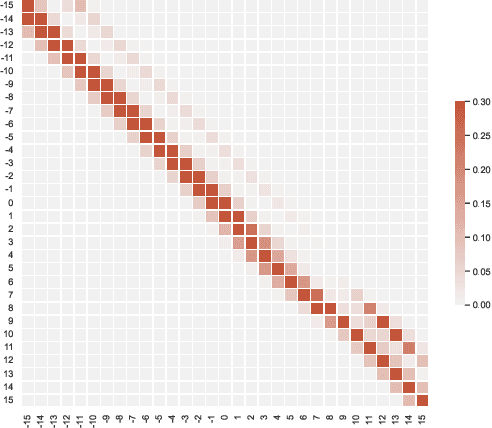
Predicting the near-future delay with accuracy for trains is momentous for railway operations and passengers' traveling experience. This work aims to design prediction models for train delays based on Netherlands Railway data. We first develop a chi-square test to show that the delay evolution over stations follows a first-order Markov chain. We then propose a delay prediction model based on non-homogeneous Markov chains. To deal with the sparsity of the transition matrices of the Markov chains, we propose a novel matrix recovery approach that relies on Gaussian kernel density estimation. Our numerical tests show that this recovery approach outperforms other heuristic approaches in prediction accuracy. The Markov chain model we propose also shows to be better than other widely-used time series models with respect to both interpretability and prediction accuracy. Moreover, our proposed model does not require a complicated training process, which is capable of handling large-scale forecasting problems.