 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnimeAgent: Is the Multi-Agent via Image-to-Video models a Good Disney Storytelling Artist?
Feb 24, 2026Custom Storyboard Generation (CSG) aims to produce high-quality, multi-character consistent storytelling. Current approaches based on static diffusion models, whether used in a one-shot manner or within multi-agent frameworks, face three key limitations: (1) Static models lack dynamic expressiveness and often resort to "copy-paste" pattern. (2) One-shot inference cannot iteratively correct missing attributes or poor prompt adherence. (3) Multi-agents rely on non-robust evaluators, ill-suited for assessing stylized, non-realistic animation. To address these, we propose AnimeAgent, the first Image-to-Video (I2V)-based multi-agent framework for CSG. Inspired by Disney's "Combination of Straight Ahead and Pose to Pose" workflow, AnimeAgent leverages I2V's implicit motion prior to enhance consistency and expressiveness, while a mixed subjective-objective reviewer enables reliable iterative refinement. We also collect a human-annotated CSG benchmark with ground-truth. Experiments show AnimeAgent achieves SOTA performance in consistency, prompt fidelity, and stylization.
Revisiting Lightweight Low-Light Image Enhancement: From a YUV Color Space Perspective
Jan 24, 2026In the current era of mobile internet, Lightweight Low-Light Image Enhancement (L3IE) is critical for mobile devices, which faces a persistent trade-off between visual quality and model compactness. While recent methods employ disentangling strategies to simplify lightweight architectural design, such as Retinex theory and YUV color space transformations, their performance is fundamentally limited by overlooking channel-specific degradation patterns and cross-channel interactions. To address this gap, we perform a frequency-domain analysis that confirms the superiority of the YUV color space for L3IE. We identify a key insight: the Y channel primarily loses low-frequency content, while the UV channels are corrupted by high-frequency noise. Leveraging this finding, we propose a novel YUV-based paradigm that strategically restores channels using a Dual-Stream Global-Local Attention module for the Y channel, a Y-guided Local-Aware Frequency Attention module for the UV channels, and a Guided Interaction module for final feature fusion. Extensive experiments validate that our model establishes a new state-of-the-art on multiple benchmarks, delivering superior visual quality with a significantly lower parameter count.
IGDNet: Zero-Shot Robust Underexposed Image Enhancement via Illumination-Guided and Denoising
Jul 03, 2025Current methods for restoring underexposed images typically rely on supervised learning with paired underexposed and well-illuminated images. However, collecting such datasets is often impractical in real-world scenarios. Moreover, these methods can lead to over-enhancement, distorting well-illuminated regions. To address these issues, we propose IGDNet, a Zero-Shot enhancement method that operates solely on a single test image, without requiring guiding priors or training data. IGDNet exhibits strong generalization ability and effectively suppresses noise while restoring illumination. The framework comprises a decomposition module and a denoising module. The former separates the image into illumination and reflection components via a dense connection network, while the latter enhances non-uniformly illuminated regions using an illumination-guided pixel adaptive correction method. A noise pair is generated through downsampling and refined iteratively to produce the final result. Extensive experiments on four public datasets demonstrate that IGDNet significantly improves visual quality under complex lighting conditions. Quantitative results on metrics like PSNR (20.41dB) and SSIM (0.860dB) show that it outperforms 14 state-of-the-art unsupervised methods. The code will be released soon.
MobileIE: An Extremely Lightweight and Effective ConvNet for Real-Time Image Enhancement on Mobile Devices
Jul 02, 2025Recent advancements in deep neural networks have driven significant progress in image enhancement (IE). However, deploying deep learning models on resource-constrained platforms, such as mobile devices, remains challenging due to high computation and memory demands. To address these challenges and facilitate real-time IE on mobile, we introduce an extremely lightweight Convolutional Neural Network (CNN) framework with around 4K parameters. Our approach integrates reparameterization with an Incremental Weight Optimization strategy to ensure efficiency. Additionally, we enhance performance with a Feature Self-Transform module and a Hierarchical Dual-Path Attention mechanism, optimized with a Local Variance-Weighted loss. With this efficient framework, we are the first to achieve real-time IE inference at up to 1,100 frames per second (FPS) while delivering competitive image quality, achieving the best trade-off between speed and performance across multiple IE tasks. The code will be available at https://github.com/AVC2-UESTC/MobileIE.git.
Precise Interception Flight Targets by Image-based Visual Servoing of Multicopter
Sep 26, 2024



Interception of low-altitude intruding targets with low-cost drones equipped strapdown camera presents a competitive option. However, the malicious maneuvers by the non-cooperative target and the coupling of the camera make the task challenging. To solve this problem, an Image-Based Visual Servoing (IBVS) control algorithm based on proportional navigation guidance with field-of-view holding capability is designed. The proposed controller reduces the miss distance while improving the stability of the visual servo system during interception. Software-in-the-loop (SITL) simulation experiments show a 72.8% reduction in the circular error probability (CEP) compared to the most recent study. This improvement enhances interception accuracy from the decimeter to the centimeter level. Real-world experiments further validate the effectiveness of the proposed algorithm.
NTIRE 2024 Challenge on Low Light Image Enhancement: Methods and Results
Apr 22, 2024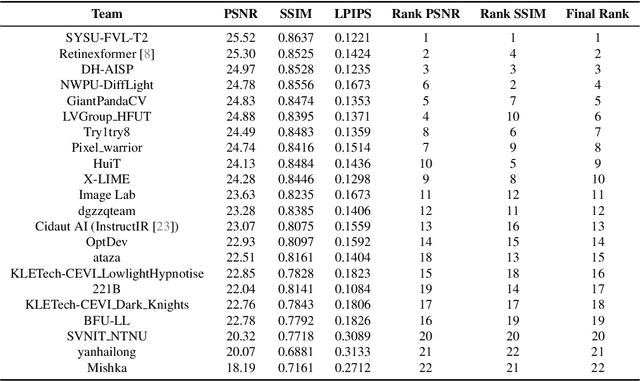


This paper reviews the NTIRE 2024 low light image enhancement challenge, highlighting the proposed solutions and results. The aim of this challenge is to discover an effective network design or solution capable of generating brighter, clearer, and visually appealing results when dealing with a variety of conditions, including ultra-high resolution (4K and beyond), non-uniform illumination, backlighting, extreme darkness, and night scenes. A notable total of 428 participants registered for the challenge, with 22 teams ultimately making valid submissions. This paper meticulously evaluates the state-of-the-art advancements in enhancing low-light images, reflecting the significant progress and creativity in this field.