 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFSID: Fully Synthetic Image Denoising via Procedural Scene Generation
Dec 07, 2022



For low-level computer vision and image processing ML tasks, training on large datasets is critical for generalization. However, the standard practice of relying on real-world images primarily from the Internet comes with image quality, scalability, and privacy issues, especially in commercial contexts. To address this, we have developed a procedural synthetic data generation pipeline and dataset tailored to low-level vision tasks. Our Unreal engine-based synthetic data pipeline populates large scenes algorithmically with a combination of random 3D objects, materials, and geometric transformations. Then, we calibrate the camera noise profiles to synthesize the noisy images. From this pipeline, we generated a fully synthetic image denoising dataset (FSID) which consists of 175,000 noisy/clean image pairs. We then trained and validated a CNN-based denoising model, and demonstrated that the model trained on this synthetic data alone can achieve competitive denoising results when evaluated on real-world noisy images captured with smartphone cameras.
Consistent Direct Time-of-Flight Video Depth Super-Resolution
Nov 16, 2022



Direct time-of-flight (dToF) sensors are promising for next-generation on-device 3D sensing. However, to achieve the sufficient signal-to-noise-ratio (SNR) in a compact module, the dToF data has limited spatial resolution (e.g., ~20x30 for iPhone dToF), and it requires a super-resolution step before being passed to downstream tasks. In this paper, we solve this super-resolution problem by fusing the low-resolution dToF data with the corresponding high-resolution RGB guidance. Unlike the conventional RGB-guided depth enhancement approaches which perform the fusion in a per-frame manner, we propose the first multi-frame fusion scheme to mitigate the spatial ambiguity resulting from the low-resolution dToF imaging. In addition, dToF sensors provide unique depth histogram information for each local patch, and we incorporate this dToF-specific feature in our network design to further alleviate spatial ambiguity. To evaluate our models on complex dynamic indoor environments and to provide a large-scale dToF sensor dataset, we introduce DyDToF, the first synthetic RGB-dToF video dataset that features dynamic objects and a realistic dToF simulator following the physical imaging process. We believe the methods and dataset are beneficial to a broad community as dToF depth sensing is becoming mainstream on mobile devices.
Refining Geometry from Depth Sensors using IR Shading Images
Aug 18, 2016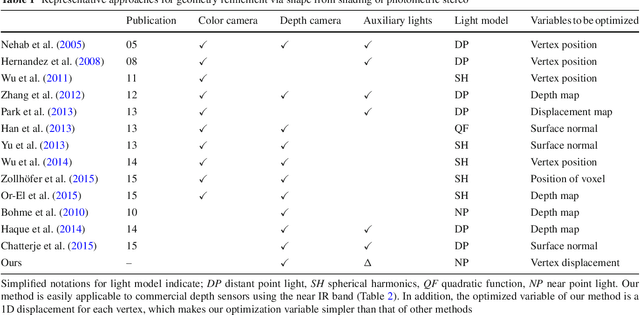
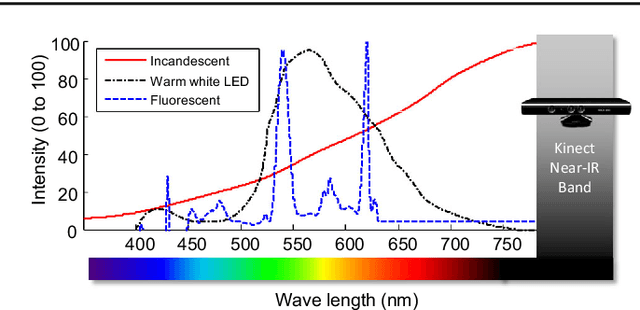
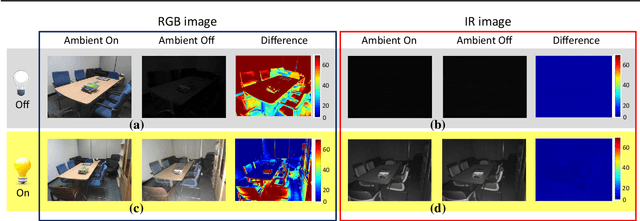
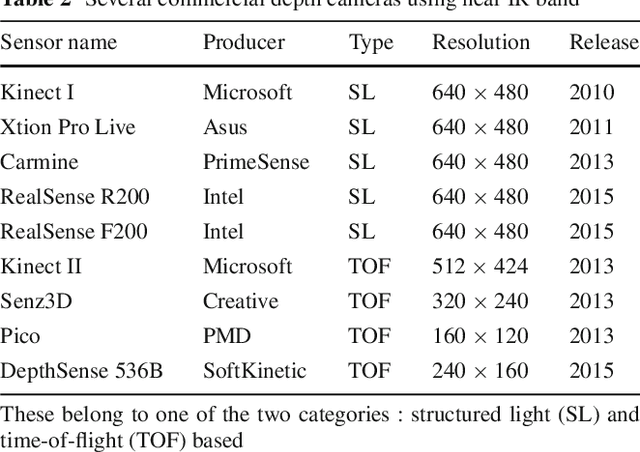
We propose a method to refine geometry of 3D meshes from a consumer level depth camera, e.g. Kinect, by exploiting shading cues captured from an infrared (IR) camera. A major benefit to using an IR camera instead of an RGB camera is that the IR images captured are narrow band images that filter out most undesired ambient light, which makes our system robust against natural indoor illumination. Moreover, for many natural objects with colorful textures in the visible spectrum, the subjects appear to have a uniform albedo in the IR spectrum. Based on our analyses on the IR projector light of the Kinect, we define a near light source IR shading model that describes the captured intensity as a function of surface normals, albedo, lighting direction, and distance between light source and surface points. To resolve the ambiguity in our model between the normals and distances, we utilize an initial 3D mesh from the Kinect fusion and multi-view information to reliably estimate surface details that were not captured and reconstructed by the Kinect fusion. Our approach directly operates on the mesh model for geometry refinement. We ran experiments on our algorithm for geometries captured by both the Kinect I and Kinect II, as the depth acquisition in Kinect I is based on a structured-light technique and that of the Kinect II is based on a time-of-flight (ToF) technology. The effectiveness of our approach is demonstrated through several challenging real-world examples. We have also performed a user study to evaluate the quality of the mesh models before and after our refinements.
Fine-scale Surface Normal Estimation using a Single NIR Image
Mar 24, 2016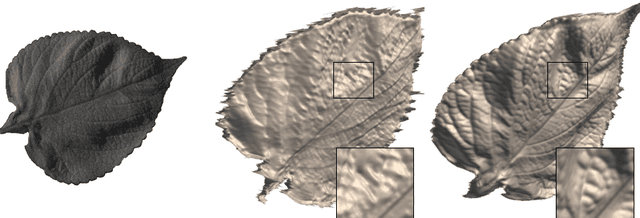
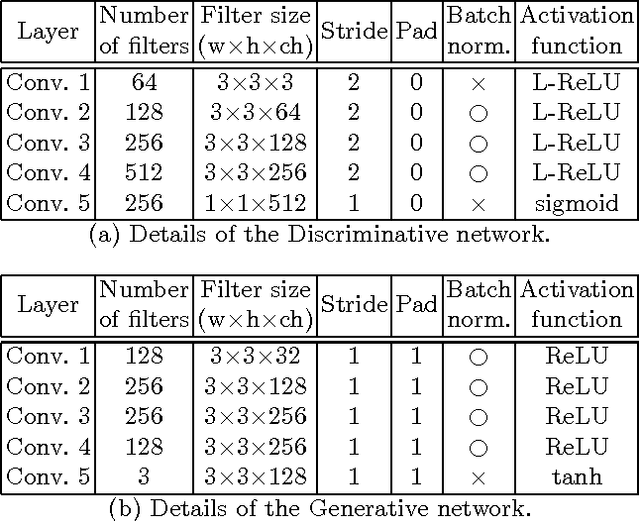
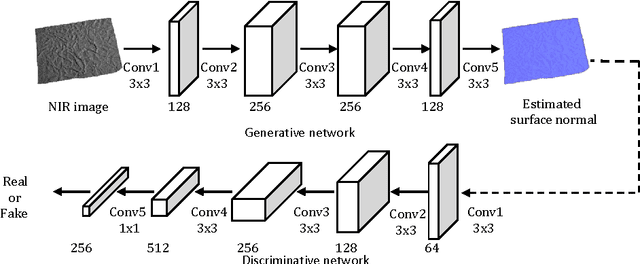
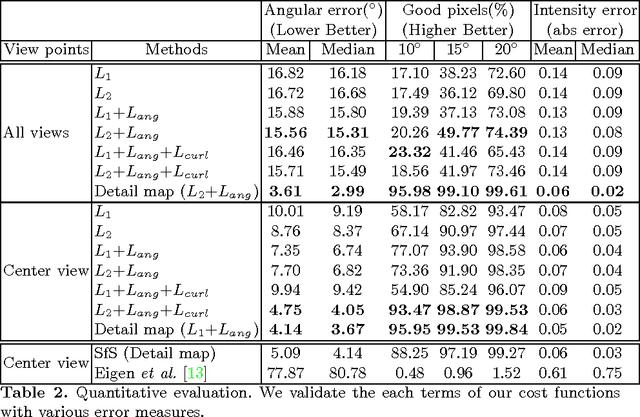
We present surface normal estimation using a single near infrared (NIR) image. We are focusing on fine-scale surface geometry captured with an uncalibrated light source. To tackle this ill-posed problem, we adopt a generative adversarial network which is effective in recovering a sharp output, which is also essential for fine-scale surface normal estimation. We incorporate angular error and integrability constraint into the objective function of the network to make estimated normals physically meaningful. We train and validate our network on a recent NIR dataset, and also evaluate the generality of our trained model by using new external datasets which are captured with a different camera under different environment.