 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlow-based Policy With Distributional Reinforcement Learning in Trajectory Optimization
Apr 01, 2026Reinforcement Learning (RL) has proven highly effective in addressing complex control and decision-making tasks. However, in most traditional RL algorithms, the policy is typically parameterized as a diagonal Gaussian distribution, which constrains the policy from capturing multimodal distributions, making it difficult to cover the full range of optimal solutions in multi-solution problems, and the return is reduced to a mean value, losing its multimodal nature and thus providing insufficient guidance for policy updates. In response to these problems, we propose a RL algorithm termed flow-based policy with distributional RL (FP-DRL). This algorithm models the policy using flow matching, which offers both computational efficiency and the capacity to fit complex distributions. Additionally, it employs a distributional RL approach to model and optimize the entire return distribution, thereby more effectively guiding multimodal policy updates and improving agent performance. Experimental trails on MuJoCo benchmarks demonstrate that the FP-DRL algorithm achieves state-of-the-art (SOTA) performance in most MuJoCo control tasks while exhibiting superior representation capability of the flow policy.
A Comprehensive Survey on Underwater Acoustic Target Positioning and Tracking: Progress, Challenges, and Perspectives
Jun 17, 2025Underwater target tracking technology plays a pivotal role in marine resource exploration, environmental monitoring, and national defense security. Given that acoustic waves represent an effective medium for long-distance transmission in aquatic environments, underwater acoustic target tracking has become a prominent research area of underwater communications and networking. Existing literature reviews often offer a narrow perspective or inadequately address the paradigm shifts driven by emerging technologies like deep learning and reinforcement learning. To address these gaps, this work presents a systematic survey of this field and introduces an innovative multidimensional taxonomy framework based on target scale, sensor perception modes, and sensor collaboration patterns. Within this framework, we comprehensively survey the literature (more than 180 publications) over the period 2016-2025, spanning from the theoretical foundations to diverse algorithmic approaches in underwater acoustic target tracking. Particularly, we emphasize the transformative potential and recent advancements of machine learning techniques, including deep learning and reinforcement learning, in enhancing the performance and adaptability of underwater tracking systems. Finally, this survey concludes by identifying key challenges in the field and proposing future avenues based on emerging technologies such as federated learning, blockchain, embodied intelligence, and large models.
Graph-attention-based Casual Discovery with Trust Region-navigated Clipping Policy Optimization
Dec 27, 2024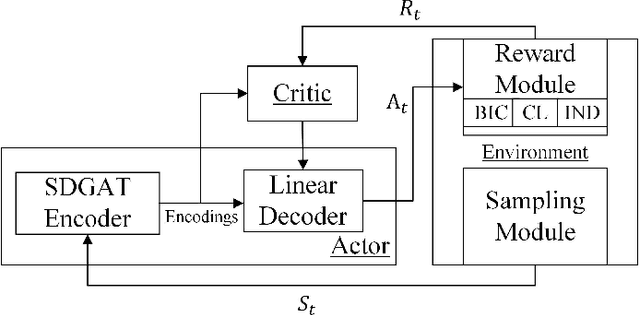
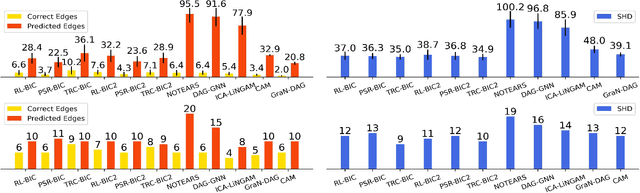
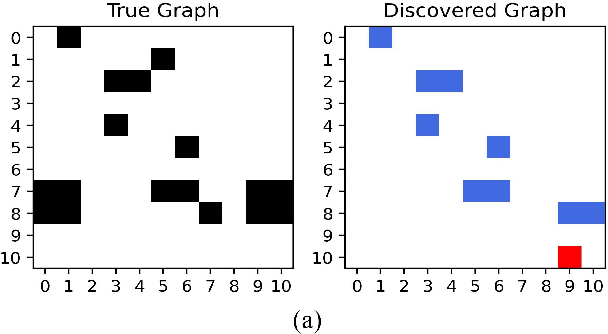
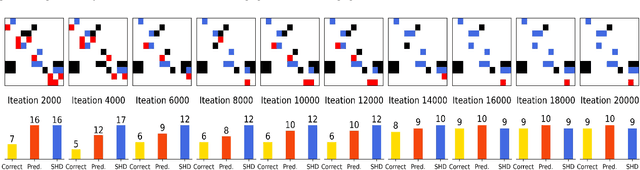
In many domains of empirical sciences, discovering the causal structure within variables remains an indispensable task. Recently, to tackle with unoriented edges or latent assumptions violation suffered by conventional methods, researchers formulated a reinforcement learning (RL) procedure for causal discovery, and equipped REINFORCE algorithm to search for the best-rewarded directed acyclic graph. The two keys to the overall performance of the procedure are the robustness of RL methods and the efficient encoding of variables. However, on the one hand, REINFORCE is prone to local convergence and unstable performance during training. Neither trust region policy optimization, being computationally-expensive, nor proximal policy optimization (PPO), suffering from aggregate constraint deviation, is decent alternative for combinatory optimization problems with considerable individual subactions. We propose a trust region-navigated clipping policy optimization method for causal discovery that guarantees both better search efficiency and steadiness in policy optimization, in comparison with REINFORCE, PPO and our prioritized sampling-guided REINFORCE implementation. On the other hand, to boost the efficient encoding of variables, we propose a refined graph attention encoder called SDGAT that can grasp more feature information without priori neighbourhood information. With these improvements, the proposed method outperforms former RL method in both synthetic and benchmark datasets in terms of output results and optimization robustness.
Learning from History: Modeling Temporal Knowledge Graphs with Sequential Copy-Generation Networks
Dec 15, 2020



Large knowledge graphs often grow to store temporal facts that model the dynamic relations or interactions of entities along the timeline. Since such temporal knowledge graphs often suffer from incompleteness, it is important to develop time-aware representation learning models that help to infer the missing temporal facts. While the temporal facts are typically evolving, it is observed that many facts often show a repeated pattern along the timeline, such as economic crises and diplomatic activities. This observation indicates that a model could potentially learn much from the known facts appeared in history. To this end, we propose a new representation learning model for temporal knowledge graphs, namely CyGNet, based on a novel timeaware copy-generation mechanism. CyGNet is not only able to predict future facts from the whole entity vocabulary, but also capable of identifying facts with repetition and accordingly predicting such future facts with reference to the known facts in the past. We evaluate the proposed method on the knowledge graph completion task using five benchmark datasets. Extensive experiments demonstrate the effectiveness of CyGNet for predicting future facts with repetition as well as de novo fact prediction.