 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient and Accurate Quantized Image Super-Resolution on Mobile NPUs, Mobile AI & AIM 2022 challenge: Report
Nov 07, 2022
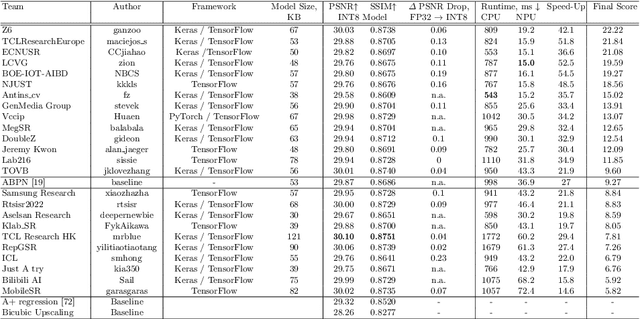
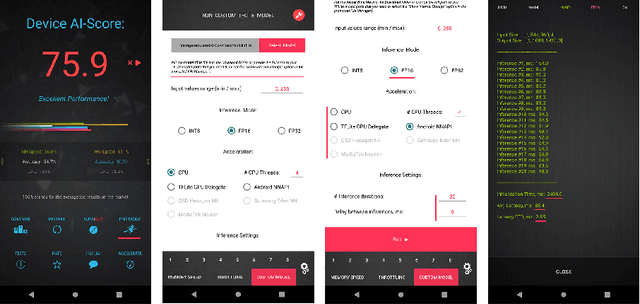
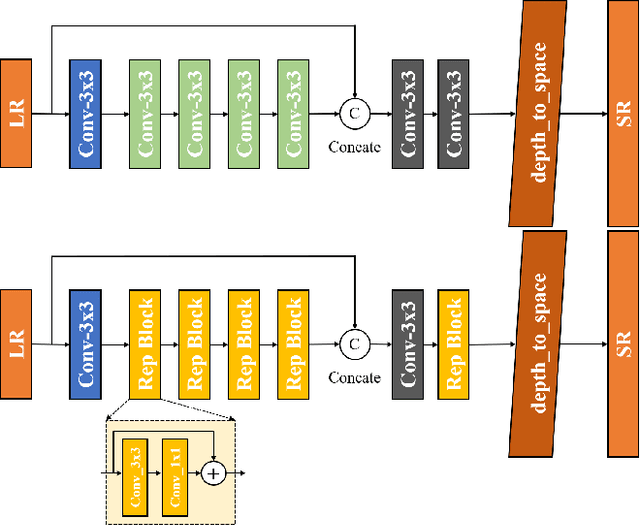
Image super-resolution is a common task on mobile and IoT devices, where one often needs to upscale and enhance low-resolution images and video frames. While numerous solutions have been proposed for this problem in the past, they are usually not compatible with low-power mobile NPUs having many computational and memory constraints. In this Mobile AI challenge, we address this problem and propose the participants to design an efficient quantized image super-resolution solution that can demonstrate a real-time performance on mobile NPUs. The participants were provided with the DIV2K dataset and trained INT8 models to do a high-quality 3X image upscaling. The runtime of all models was evaluated on the Synaptics VS680 Smart Home board with a dedicated edge NPU capable of accelerating quantized neural networks. All proposed solutions are fully compatible with the above NPU, demonstrating an up to 60 FPS rate when reconstructing Full HD resolution images. A detailed description of all models developed in the challenge is provided in this paper.
Dual-Modality Vehicle Anomaly Detection via Bilateral Trajectory Tracing
Jun 09, 2021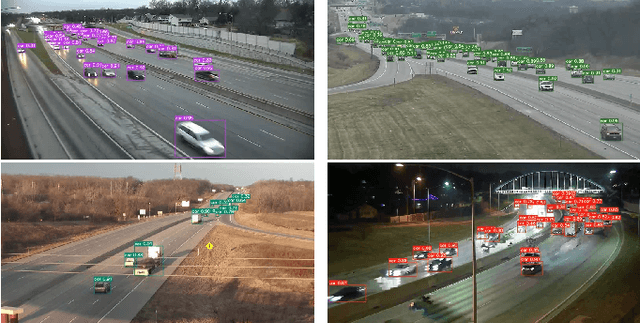
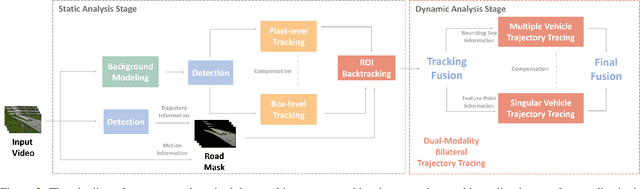
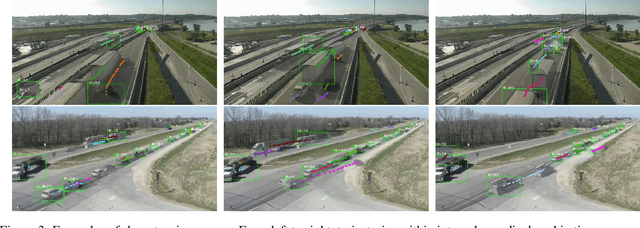
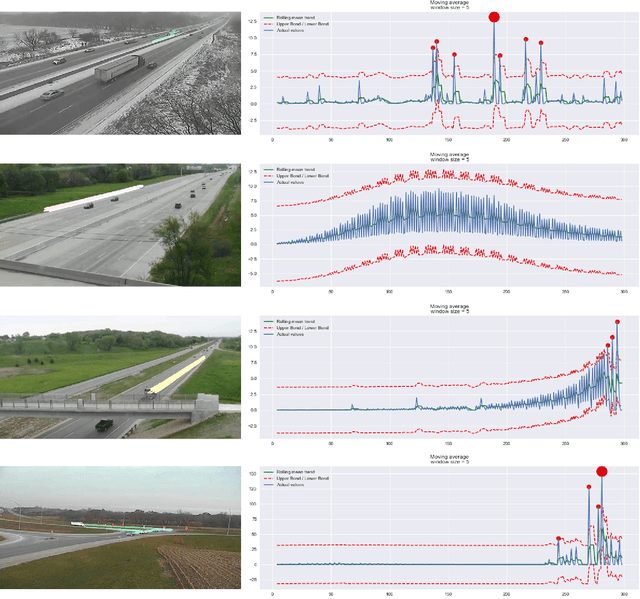
Traffic anomaly detection has played a crucial role in Intelligent Transportation System (ITS). The main challenges of this task lie in the highly diversified anomaly scenes and variational lighting conditions. Although much work has managed to identify the anomaly in homogenous weather and scene, few resolved to cope with complex ones. In this paper, we proposed a dual-modality modularized methodology for the robust detection of abnormal vehicles. We introduced an integrated anomaly detection framework comprising the following modules: background modeling, vehicle tracking with detection, mask construction, Region of Interest (ROI) backtracking, and dual-modality tracing. Concretely, we employed background modeling to filter the motion information and left the static information for later vehicle detection. For the vehicle detection and tracking module, we adopted YOLOv5 and multi-scale tracking to localize the anomalies. Besides, we utilized the frame difference and tracking results to identify the road and obtain the mask. In addition, we introduced multiple similarity estimation metrics to refine the anomaly period via backtracking. Finally, we proposed a dual-modality bilateral tracing module to refine the time further. The experiments conducted on the Track 4 testset of the NVIDIA 2021 AI City Challenge yielded a result of 0.9302 F1-Score and 3.4039 root mean square error (RMSE), indicating the effectiveness of our framework.