 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHyperspectral Neural Radiance Fields
Mar 21, 2024

Hyperspectral Imagery (HSI) has been used in many applications to non-destructively determine the material and/or chemical compositions of samples. There is growing interest in creating 3D hyperspectral reconstructions, which could provide both spatial and spectral information while also mitigating common HSI challenges such as non-Lambertian surfaces and translucent objects. However, traditional 3D reconstruction with HSI is difficult due to technological limitations of hyperspectral cameras. In recent years, Neural Radiance Fields (NeRFs) have seen widespread success in creating high quality volumetric 3D representations of scenes captured by a variety of camera models. Leveraging recent advances in NeRFs, we propose computing a hyperspectral 3D reconstruction in which every point in space and view direction is characterized by wavelength-dependent radiance and transmittance spectra. To evaluate our approach, a dataset containing nearly 2000 hyperspectral images across 8 scenes and 2 cameras was collected. We perform comparisons against traditional RGB NeRF baselines and apply ablation testing with alternative spectra representations. Finally, we demonstrate the potential of hyperspectral NeRFs for hyperspectral super-resolution and imaging sensor simulation. We show that our hyperspectral NeRF approach enables creating fast, accurate volumetric 3D hyperspectral scenes and enables several new applications and areas for future study.
Architectural-Scale Artistic Brush Painting with a Hybrid Cable Robot
Mar 18, 2024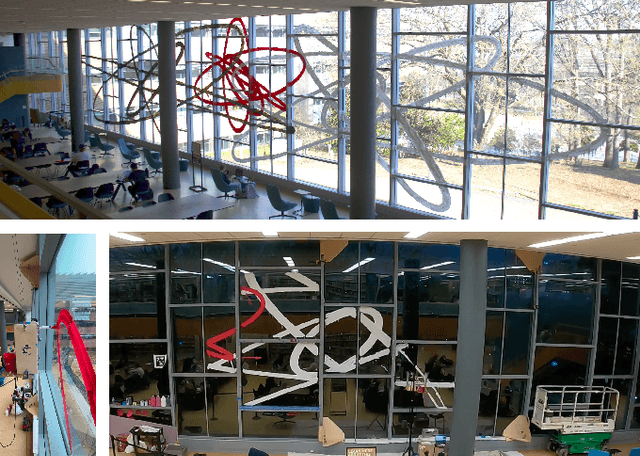
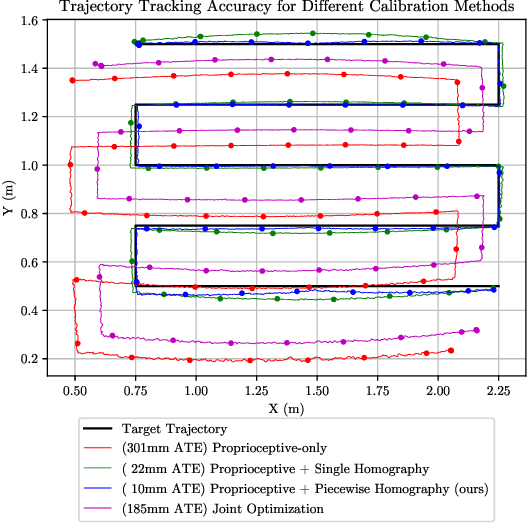
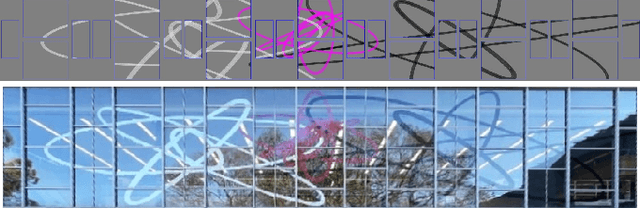
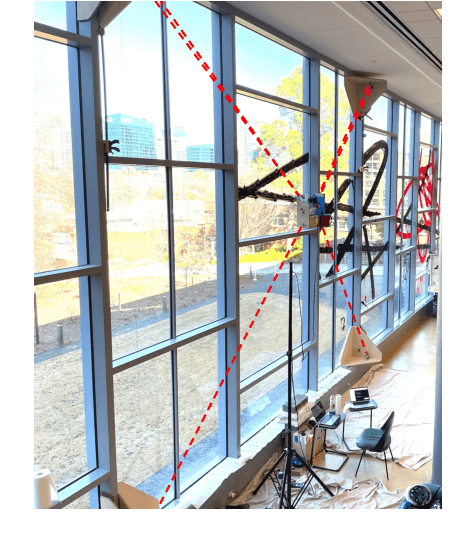
Robot art presents an opportunity to both showcase and advance state-of-the-art robotics through the challenging task of creating art. Creating large-scale artworks in particular engages the public in a way that small-scale works cannot, and the distinct qualities of brush strokes contribute to an organic and human-like quality. Combining the large scale of murals with the strokes of the brush medium presents an especially impactful result, but also introduces unique challenges in maintaining precise, dextrous motion control of the brush across such a large workspace. In this work, we present the first robot to our knowledge that can paint architectural-scale murals with a brush. We create a hybrid robot consisting of a cable-driven parallel robot and 4 degree of freedom (DoF) serial manipulator to paint a 27m by 3.7m mural on windows spanning 2-stories of a building. We discuss our approach to achieving both the scale and accuracy required for brush-painting a mural through a combination of novel mechanical design elements, coordinated planning and control, and on-site calibration algorithms with experimental validations.
Generalizing Trajectory Retiming to Quadratic Objective Functions
Sep 18, 2023Trajectory retiming is the task of computing a feasible time parameterization to traverse a path. It is commonly used in the decoupled approach to trajectory optimization whereby a path is first found, then a retiming algorithm computes a speed profile that satisfies kino-dynamic and other constraints. While trajectory retiming is most often formulated with the minimum-time objective (i.e. traverse the path as fast as possible), it is not always the most desirable objective, particularly when we seek to balance multiple objectives or when bang-bang control is unsuitable. In this paper, we present a novel algorithm based on factor graph variable elimination that can solve for the global optimum of the retiming problem with quadratic objectives as well (e.g. minimize control effort or match a nominal speed by minimizing squared error), which may extend to arbitrary objectives with iteration. Our work extends prior works, which find only solutions on the boundary of the feasible region, while maintaining the same linear time complexity from a single forward-backward pass. We experimentally demonstrate that (1) we achieve better real-world robot performance by using quadratic objectives in place of the minimum-time objective, and (2) our implementation is comparable or faster than state-of-the-art retiming algorithms.
A Hybrid Cable-Driven Robot for Non-Destructive Leafy Plant Monitoring and Mass Estimation using Structure from Motion
Sep 19, 2022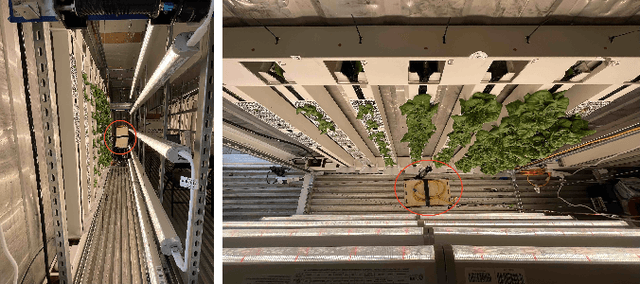
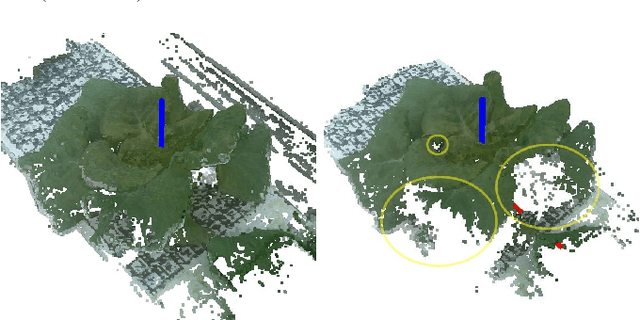
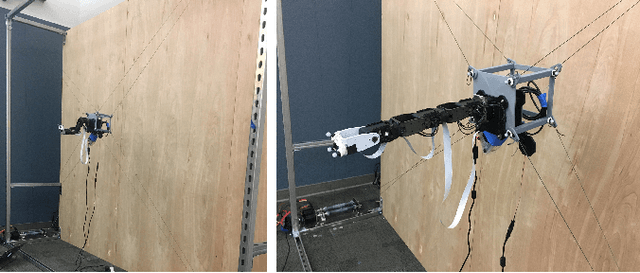
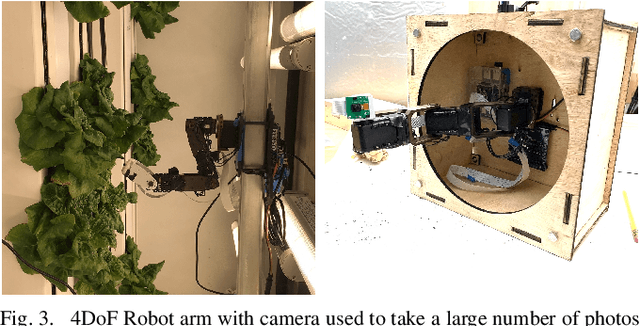
We propose a novel hybrid cable-based robot with manipulator and camera for high-accuracy, medium-throughput plant monitoring in a vertical hydroponic farm and, as an example application, demonstrate non-destructive plant mass estimation. Plant monitoring with high temporal and spatial resolution is important to both farmers and researchers to detect anomalies and develop predictive models for plant growth. The availability of high-quality, off-the-shelf structure-from-motion (SfM) and photogrammetry packages has enabled a vibrant community of roboticists to apply computer vision for non-destructive plant monitoring. While existing approaches tend to focus on either high-throughput (e.g. satellite, unmanned aerial vehicle (UAV), vehicle-mounted, conveyor-belt imagery) or high-accuracy/robustness to occlusions (e.g. turn-table scanner or robot arm), we propose a middle-ground that achieves high accuracy with a medium-throughput, highly automated robot. Our design pairs the workspace scalability of a cable-driven parallel robot (CDPR) with the dexterity of a 4 degree-of-freedom (DoF) robot arm to autonomously image many plants from a variety of viewpoints. We describe our robot design and demonstrate it experimentally by collecting daily photographs of 54 plants from 64 viewpoints each. We show that our approach can produce scientifically useful measurements, operate fully autonomously after initial calibration, and produce better reconstructions and plant property estimates than those of over-canopy methods (e.g. UAV). As example applications, we show that our system can successfully estimate plant mass with a Mean Absolute Error (MAE) of 0.586g and, when used to perform hypothesis testing on the relationship between mass and age, produces p-values comparable to ground-truth data (p=0.0020 and p=0.0016, respectively).
Locally Optimal Estimation and Control of Cable Driven Parallel Robots using Time Varying Linear Quadratic Gaussian Control
Aug 01, 2022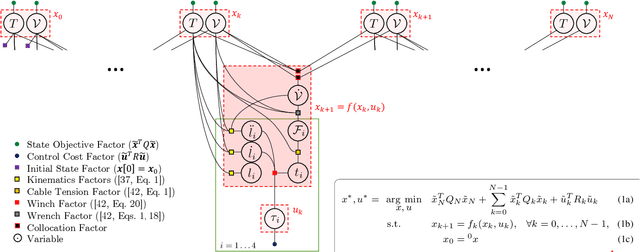
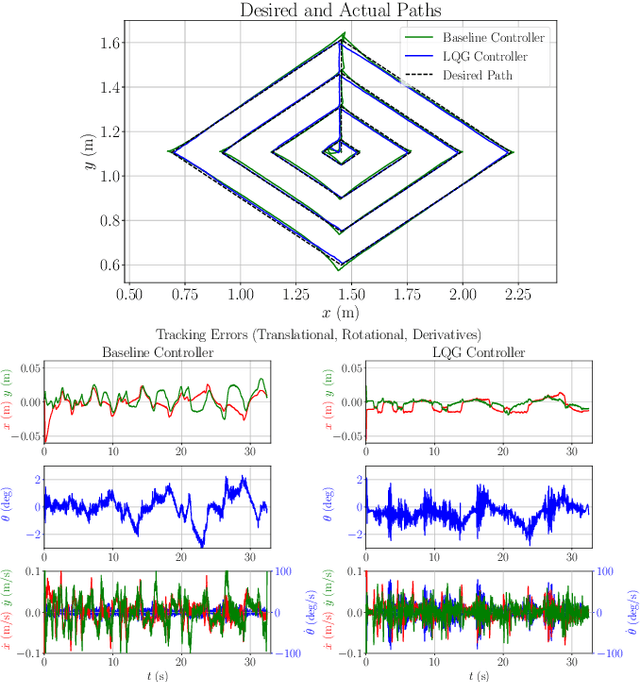
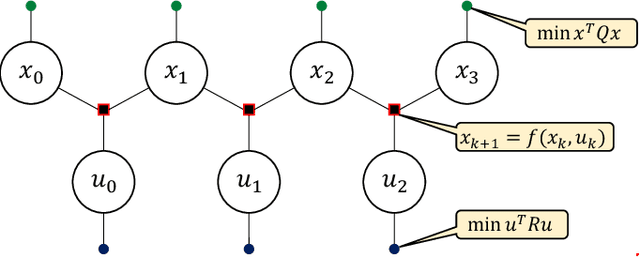
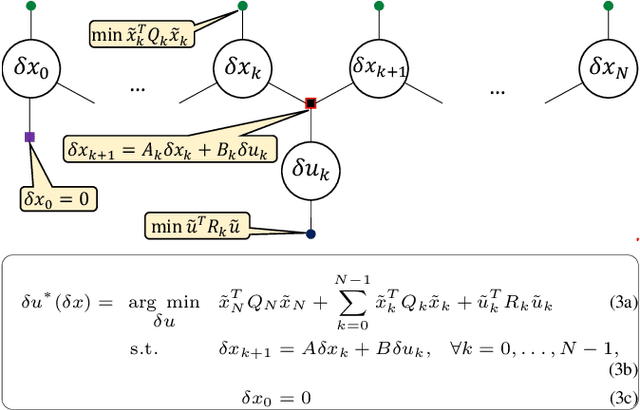
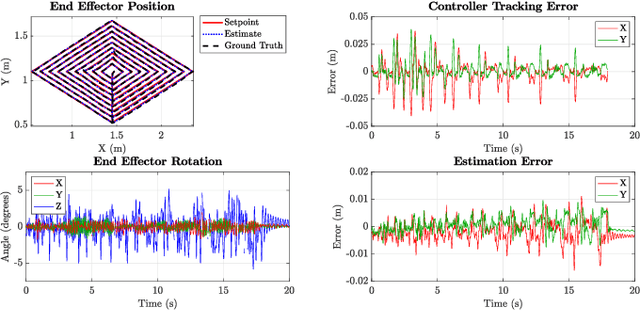
We present a locally optimal tracking controller for Cable Driven Parallel Robot (CDPR) control based on a time-varying Linear Quadratic Gaussian (TV-LQG) controller. In contrast to many methods which use fixed feedback gains, our time-varying controller computes the optimal gains depending on the location in the workspace and the future trajectory. Meanwhile, we rely heavily on offline computation to reduce the burden of online implementation and feasibility checking. Following the growing popularity of probabilistic graphical models for optimal control, we use factor graphs as a tool to formulate our controller for their efficiency, intuitiveness, and modularity. The topology of a factor graph encodes the relevant structural properties of equations in a way that facilitates insight and efficient computation using sparse linear algebra solvers. We first use factor graph optimization to compute a nominal trajectory, then linearize the graph and apply variable elimination to compute the locally optimal, time varying linear feedback gains. Next, we leverage the factor graph formulation to compute the locally optimal, time-varying Kalman Filter gains, and finally combine the locally optimal linear control and estimation laws to form a TV-LQG controller. We compare the tracking accuracy of our TV-LQG controller to a state-of-the-art dual-space feed-forward controller on a 2.9m x 2.3m, 4-cable planar robot and demonstrate improved tracking accuracies of 0.8{\deg} and 11.6mm root mean square error in rotation and translation respectively.
Extended Version of GTGraffiti: Spray Painting Graffiti Art from Human Painting Motions with a Cable Driven Parallel Robot
Sep 16, 2021

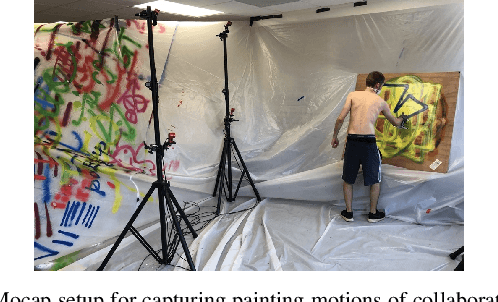
We present GTGraffiti, a graffiti painting system from Georgia Tech that tackles challenges in art, hardware, and human-robot collaboration. The problem of painting graffiti in a human style is particularly challenging and requires a system-level approach because the robotics and art must be designed around each other. The robot must be highly dynamic over a large workspace while the artist must work within the robot's limitations. Our approach consists of three stages: artwork capture, robot hardware, and planning & control. We use motion capture to capture collaborator painting motions which are then composed and processed into a time-varying linear feedback controller for a cable-driven parallel robot (CDPR) to execute. In this work, we will describe the capturing process, the design and construction of a purpose-built CDPR, and the software for turning an artist's vision into control commands. Our work represents an important step towards faithfully recreating human graffiti artwork by demonstrating that we can reproduce artist motions up to 2m/s and 20m/s$^2$ within 9.3mm RMSE to paint artworks. Added material not in the original work is colored in red.
Equality Constrained Linear Optimal Control With Factor Graphs
Nov 02, 2020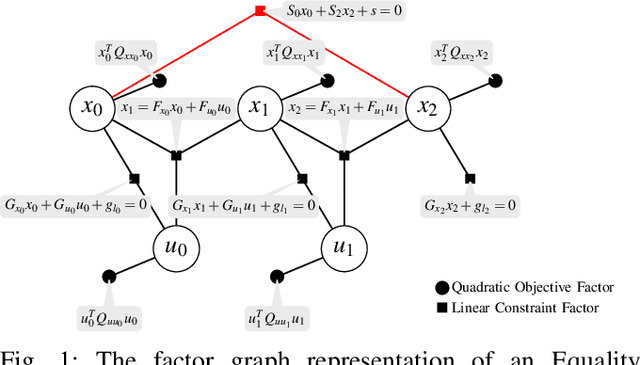
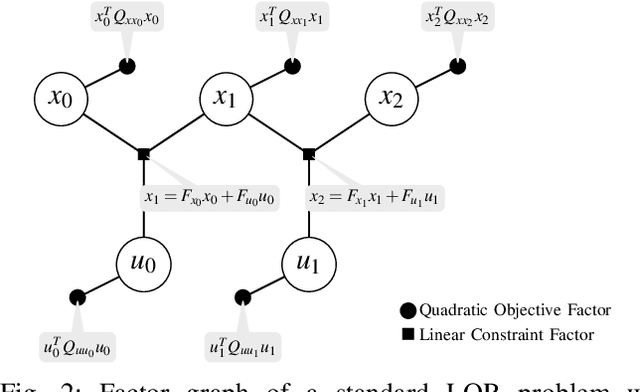
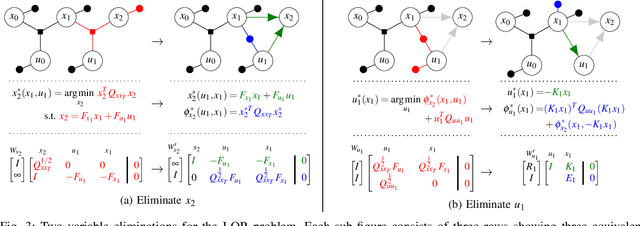
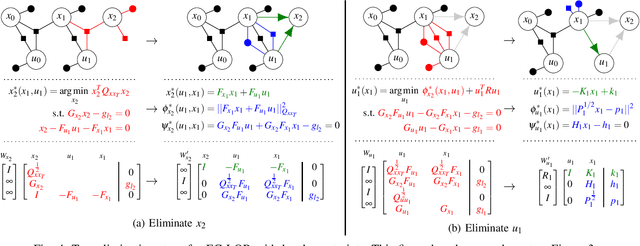
This paper presents a novel factor graph-based approach to solve the discrete-time finite-horizon Linear Quadratic Regulator problem subject to auxiliary linear equality constraints within and across time steps. We represent such optimal control problems using constrained factor graphs and optimize the factor graphs to obtain the optimal trajectory and the feedback control policies using the variable elimination algorithm with a modified Gram-Schmidt process. We prove that our approach has the same order of computational complexity as the state-of-the-art dynamic programming approach. Furthermore, current dynamic programming approaches can only handle equality constraints between variables at the same time step, but ours can handle equality constraints among any combination of variables at any time step while maintaining linear complexity with respect to trajectory length. Our approach can be used to efficiently generate trajectories and feedback control policies to achieve periodic motion or repetitive manipulation.