 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInitialization of Monocular Visual Navigation for Autonomous Agents Using Modified Structure from Small Motion
Sep 24, 2024



We propose a standalone monocular visual Simultaneous Localization and Mapping (vSLAM) initialization pipeline for autonomous robots in space. Our method, a state-of-the-art factor graph optimization pipeline, enhances classical Structure from Small Motion (SfSM) to robustly initialize a monocular agent in weak-perspective projection scenes. Furthermore, it overcomes visual estimation challenges introduced by spacecraft inspection trajectories, such as: center-pointing motion, which exacerbates the bas-relief ambiguity, and the presence of a dominant plane in the scene, which causes motion estimation degeneracies in classical Structure from Motion (SfM). We validate our method on realistic, simulated satellite inspection images exhibiting weak-perspective projection, and we demonstrate its effectiveness and improved performance compared to other monocular initialization procedures.
Extended Version of GTGraffiti: Spray Painting Graffiti Art from Human Painting Motions with a Cable Driven Parallel Robot
Sep 16, 2021
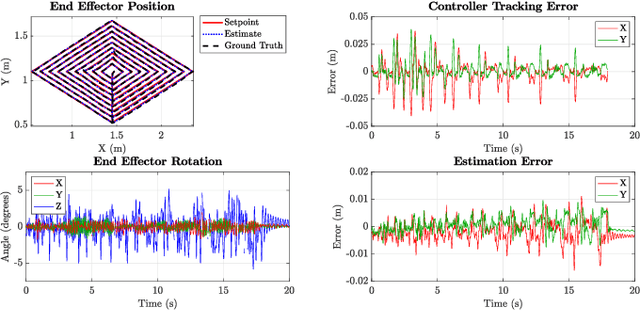

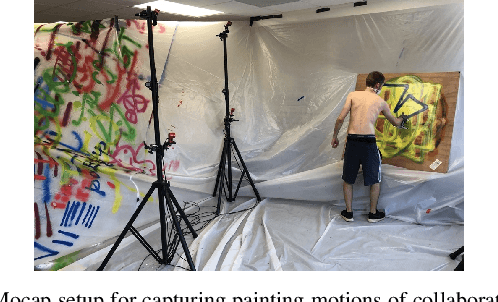
We present GTGraffiti, a graffiti painting system from Georgia Tech that tackles challenges in art, hardware, and human-robot collaboration. The problem of painting graffiti in a human style is particularly challenging and requires a system-level approach because the robotics and art must be designed around each other. The robot must be highly dynamic over a large workspace while the artist must work within the robot's limitations. Our approach consists of three stages: artwork capture, robot hardware, and planning & control. We use motion capture to capture collaborator painting motions which are then composed and processed into a time-varying linear feedback controller for a cable-driven parallel robot (CDPR) to execute. In this work, we will describe the capturing process, the design and construction of a purpose-built CDPR, and the software for turning an artist's vision into control commands. Our work represents an important step towards faithfully recreating human graffiti artwork by demonstrating that we can reproduce artist motions up to 2m/s and 20m/s$^2$ within 9.3mm RMSE to paint artworks. Added material not in the original work is colored in red.