 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArchitectural-Scale Artistic Brush Painting with a Hybrid Cable Robot
Paper and Code
Mar 18, 2024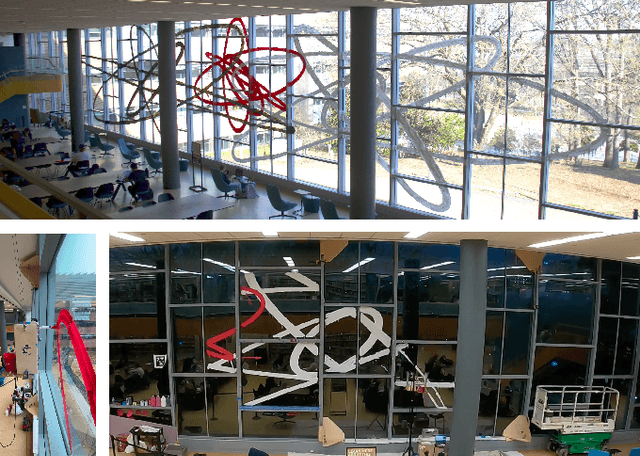
Robot art presents an opportunity to both showcase and advance state-of-the-art robotics through the challenging task of creating art. Creating large-scale artworks in particular engages the public in a way that small-scale works cannot, and the distinct qualities of brush strokes contribute to an organic and human-like quality. Combining the large scale of murals with the strokes of the brush medium presents an especially impactful result, but also introduces unique challenges in maintaining precise, dextrous motion control of the brush across such a large workspace. In this work, we present the first robot to our knowledge that can paint architectural-scale murals with a brush. We create a hybrid robot consisting of a cable-driven parallel robot and 4 degree of freedom (DoF) serial manipulator to paint a 27m by 3.7m mural on windows spanning 2-stories of a building. We discuss our approach to achieving both the scale and accuracy required for brush-painting a mural through a combination of novel mechanical design elements, coordinated planning and control, and on-site calibration algorithms with experimental validations.