 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAOI: Turning Failed Trajectories into Training Signals for Autonomous Cloud Diagnosis
Mar 05, 2026Large language model (LLM) agents offer a promising data-driven approach to automating Site Reliability Engineering (SRE), yet their enterprise deployment is constrained by three challenges: restricted access to proprietary data, unsafe action execution under permission-governed environments, and the inability of closed systems to improve from failures. We present AOI (Autonomous Operations Intelligence), a trainable multi-agent framework formulating automated operations as a structured trajectory learning problem under security constraints. Our approach integrates three key components. First, a trainable diagnostic system applies Group Relative Policy Optimization (GRPO) to distill expert-level knowledge into locally deployed open-source models, enabling preference-based learning without exposing sensitive data. Second, a read-write separated execution architecture decomposes operational trajectories into observation, reasoning, and action phases, allowing safe learning while preventing unauthorized state mutation. Third, a Failure Trajectory Closed-Loop Evolver mines unsuccessful trajectories and converts them into corrective supervision signals, enabling continual data augmentation. Evaluated on the AIOpsLab benchmark, our contributions yield cumulative gains. (1) The AOI runtime alone achieves 66.3% best@5 success on all 86 tasks, outperforming the prior state-of-the-art (41.9%) by 24.4 points. (2) Adding Observer GRPO training, a locally deployed 14B model reaches 42.9% avg@1 on 63 held-out tasks with unseen fault types, surpassing Claude Sonnet 4.5. (3) The Evolver converts 37 failed trajectories into diagnostic guidance, improving end-to-end avg@5 by 4.8 points while reducing variance by 35%.
OpenDevin: An Open Platform for AI Software Developers as Generalist Agents
Jul 23, 2024



Software is one of the most powerful tools that we humans have at our disposal; it allows a skilled programmer to interact with the world in complex and profound ways. At the same time, thanks to improvements in large language models (LLMs), there has also been a rapid development in AI agents that interact with and affect change in their surrounding environments. In this paper, we introduce OpenDevin, a platform for the development of powerful and flexible AI agents that interact with the world in similar ways to those of a human developer: by writing code, interacting with a command line, and browsing the web. We describe how the platform allows for the implementation of new agents, safe interaction with sandboxed environments for code execution, coordination between multiple agents, and incorporation of evaluation benchmarks. Based on our currently incorporated benchmarks, we perform an evaluation of agents over 15 challenging tasks, including software engineering (e.g., SWE-Bench) and web browsing (e.g., WebArena), among others. Released under the permissive MIT license, OpenDevin is a community project spanning academia and industry with more than 1.3K contributions from over 160 contributors and will improve going forward.
Design and trajectory tracking control of CuRobot: A Cubic Reversible Robot
Nov 28, 2023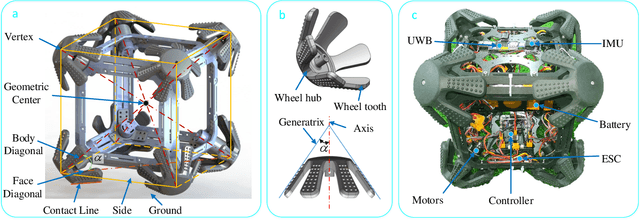
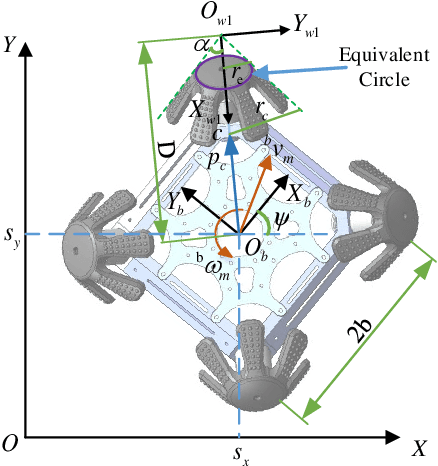
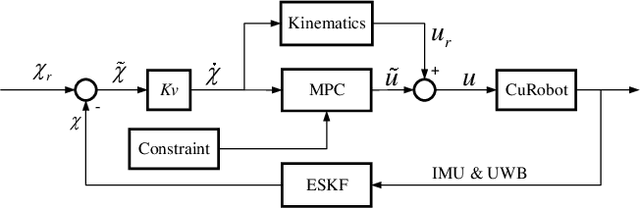
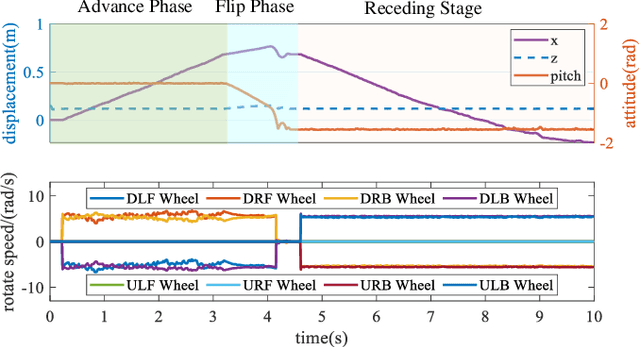
In field environments, numerous robots necessitate manual intervention for restoration of functionality post a turnover, resulting in diminished operational efficiency. This study presents an innovative design solution for a reversible omnidirectional mobile robot denoted as CuRobot, featuring a cube structure, thereby facilitating uninterrupted omnidirectional movement even in the event of flipping. The incorporation of eight conical wheels at the cube vertices ensures consistent omnidirectional motion no matter which face of the cube contacts the ground. Additionally, a kinematic model is formulated for CuRobot, accompanied by the development of a trajectory tracking controller utilizing model predictive control. Through simulation experiments, the correlation between trajectory tracking accuracy and the robot's motion direction is examined. Furthermore, the robot's proficiency in omnidirectional mobility and sustained movement post-flipping is substantiated via both simulation and prototype experiments. This design reduces the inefficiencies associated with manual intervention, thereby increasing the operational robustness of robots in field environments.