 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and trajectory tracking control of CuRobot: A Cubic Reversible Robot
Paper and Code
Nov 28, 2023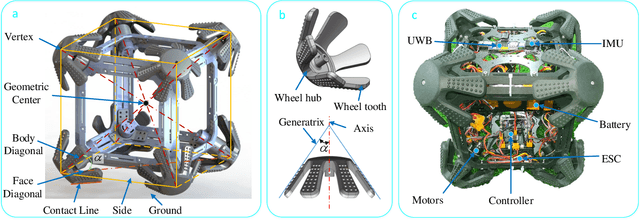
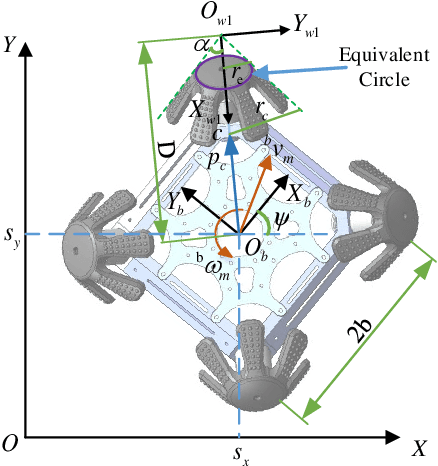
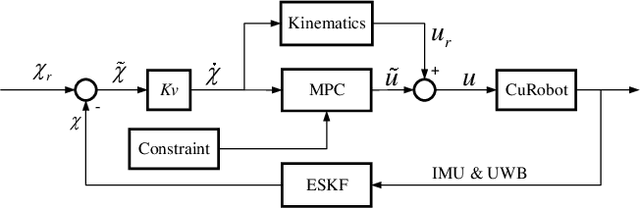
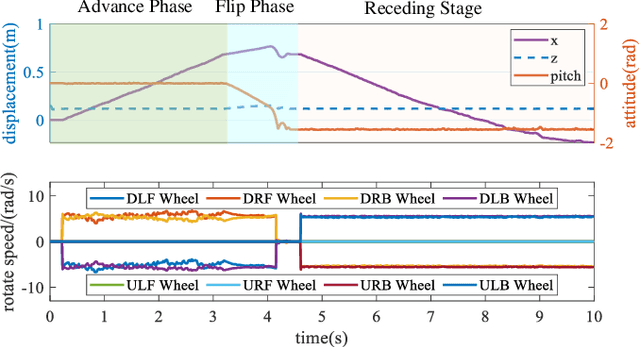
In field environments, numerous robots necessitate manual intervention for restoration of functionality post a turnover, resulting in diminished operational efficiency. This study presents an innovative design solution for a reversible omnidirectional mobile robot denoted as CuRobot, featuring a cube structure, thereby facilitating uninterrupted omnidirectional movement even in the event of flipping. The incorporation of eight conical wheels at the cube vertices ensures consistent omnidirectional motion no matter which face of the cube contacts the ground. Additionally, a kinematic model is formulated for CuRobot, accompanied by the development of a trajectory tracking controller utilizing model predictive control. Through simulation experiments, the correlation between trajectory tracking accuracy and the robot's motion direction is examined. Furthermore, the robot's proficiency in omnidirectional mobility and sustained movement post-flipping is substantiated via both simulation and prototype experiments. This design reduces the inefficiencies associated with manual intervention, thereby increasing the operational robustness of robots in field environments.