 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSEGAR: Selective Enhancement for Generative Augmented Reality
Mar 25, 2026Generative world models offer a compelling foundation for augmented-reality (AR) applications: by predicting future image sequences that incorporate deliberate visual edits, they enable temporally coherent, augmented future frames that can be computed ahead of time and cached, avoiding per-frame rendering from scratch in real time. In this work, we present SEGAR, a preliminary framework that combines a diffusion-based world model with a selective correction stage to support this vision. The world model generates augmented future frames with region-specific edits while preserving others, and the correction stage subsequently aligns safety-critical regions with real-world observations while preserving intended augmentations elsewhere. We demonstrate this pipeline in driving scenarios as a representative setting where semantic region structure is well defined and real-world feedback is readily available. We view this as an early step toward generative world models as practical AR infrastructure, where future frames can be generated, cached, and selectively corrected on demand.
The Robotability Score: Enabling Harmonious Robot Navigation on Urban Streets
Apr 15, 2025This paper introduces the Robotability Score ($R$), a novel metric that quantifies the suitability of urban environments for autonomous robot navigation. Through expert interviews and surveys, we identify and weigh key features contributing to R for wheeled robots on urban streets. Our findings reveal that pedestrian density, crowd dynamics and pedestrian flow are the most critical factors, collectively accounting for 28% of the total score. Computing robotability across New York City yields significant variation; the area of highest R is 3.0 times more "robotable" than the area of lowest R. Deployments of a physical robot on high and low robotability areas show the adequacy of the score in anticipating the ease of robot navigation. This new framework for evaluating urban landscapes aims to reduce uncertainty in robot deployment while respecting established mobility patterns and urban planning principles, contributing to the discourse on harmonious human-robot environments.
Making Sense of Robots in Public Spaces: A Study of Trash Barrel Robots
Apr 01, 2025


In this work, we analyze video data and interviews from a public deployment of two trash barrel robots in a large public space to better understand the sensemaking activities people perform when they encounter robots in public spaces. Based on an analysis of 274 human-robot interactions and interviews with N=65 individuals or groups, we discovered that people were responding not only to the robots or their behavior, but also to the general idea of deploying robots as trashcans, and the larger social implications of that idea. They wanted to understand details about the deployment because having that knowledge would change how they interact with the robot. Based on our data and analysis, we have provided implications for design that may be topics for future human-robot design researchers who are exploring robots for public space deployment. Furthermore, our work offers a practical example of analyzing field data to make sense of robots in public spaces.
ReStory: VLM-augmentation of Social Human-Robot Interaction Datasets
Dec 30, 2024
Internet-scaled datasets are a luxury for human-robot interaction (HRI) researchers, as collecting natural interaction data in the wild is time-consuming and logistically challenging. The problem is exacerbated by robots' different form factors and interaction modalities. Inspired by recent work on ethnomethodological and conversation analysis (EMCA) in the domain of HRI, we propose ReStory, a method that has the potential to augment existing in-the-wild human-robot interaction datasets leveraging Vision Language Models. While still requiring human supervision, ReStory is capable of synthesizing human-interpretable interaction scenarios in the form of storyboards. We hope our proposed approach provides HRI researchers and interaction designers with a new angle to utilizing their valuable and scarce data.
Field Notes on Deploying Research Robots in Public Spaces
Apr 29, 2024

Human-robot interaction requires to be studied in the wild. In the summers of 2022 and 2023, we deployed two trash barrel service robots through the wizard-of-oz protocol in public spaces to study human-robot interactions in urban settings. We deployed the robots at two different public plazas in downtown Manhattan and Brooklyn for a collective of 20 hours of field time. To date, relatively few long-term human-robot interaction studies have been conducted in shared public spaces. To support researchers aiming to fill this gap, we would like to share some of our insights and learned lessons that would benefit both researchers and practitioners on how to deploy robots in public spaces. We share best practices and lessons learned with the HRI research community to encourage more in-the-wild research of robots in public spaces and call for the community to share their lessons learned to a GitHub repository.
SSUP-HRI: Social Signaling in Urban Public Human-Robot Interaction dataset
Mar 16, 2024This paper introduces our dataset featuring human-robot interactions (HRI) in urban public environments. This dataset is rich with social signals that we believe can be modeled to help understand naturalistic human-robot interaction. Our dataset currently comprises approximately 15 hours of video footage recorded from the robots' perspectives, within which we annotated a total of 274 observable interactions featuring a wide range of naturalistic human-robot interactions. The data was collected by two mobile trash barrel robots deployed in Astor Place, New York City, over the course of a week. We invite the HRI community to access and utilize our dataset. To the best of our knowledge, this is the first dataset showcasing robot deployments in a complete public, non-controlled setting involving urban residents.
Human-Robot Commensality: Bite Timing Prediction for Robot-Assisted Feeding in Groups
Jul 07, 2022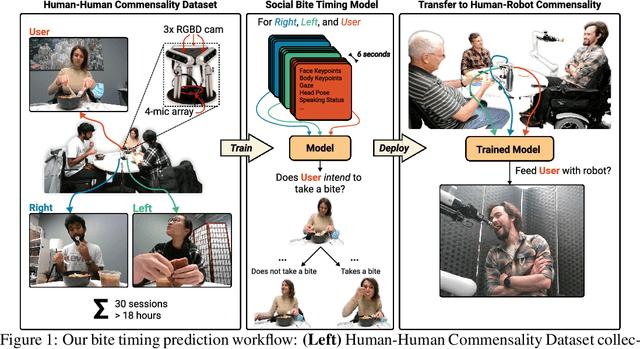
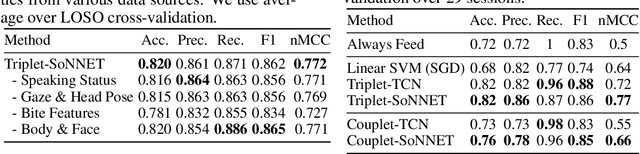
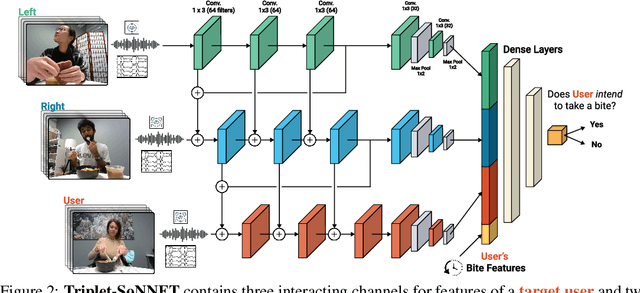
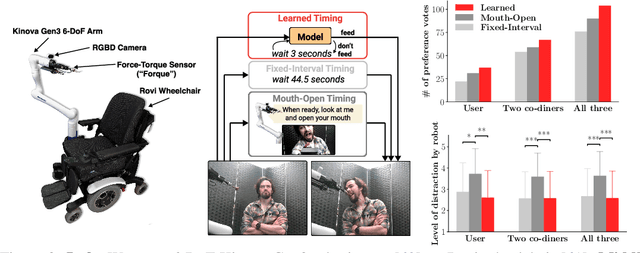
We develop data-driven models to predict when a robot should feed during social dining scenarios. Being able to eat independently with friends and family is considered one of the most memorable and important activities for people with mobility limitations. Robots can potentially help with this activity but robot-assisted feeding is a multi-faceted problem with challenges in bite acquisition, bite timing, and bite transfer. Bite timing in particular becomes uniquely challenging in social dining scenarios due to the possibility of interrupting a social human-robot group interaction during commensality. Our key insight is that bite timing strategies that take into account the delicate balance of social cues can lead to seamless interactions during robot-assisted feeding in a social dining scenario. We approach this problem by collecting a multimodal Human-Human Commensality Dataset (HHCD) containing 30 groups of three people eating together. We use this dataset to analyze human-human commensality behaviors and develop bite timing prediction models in social dining scenarios. We also transfer these models to human-robot commensality scenarios. Our user studies show that prediction improves when our algorithm uses multimodal social signaling cues between diners to model bite timing. The HHCD dataset, videos of user studies, and code will be publicly released after acceptance.
Learning Representations from Temporally Smooth Data
Dec 12, 2020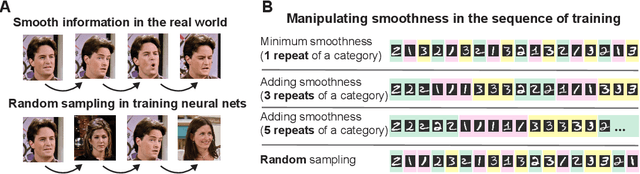
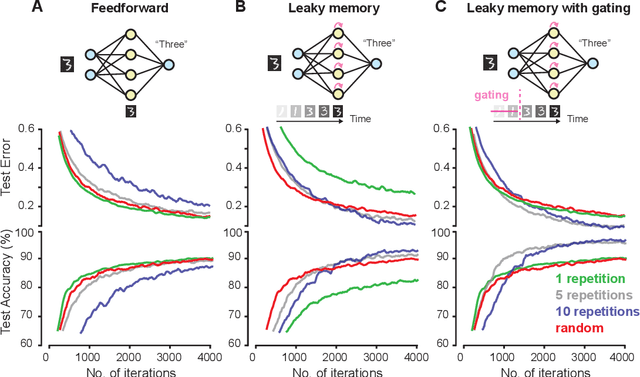
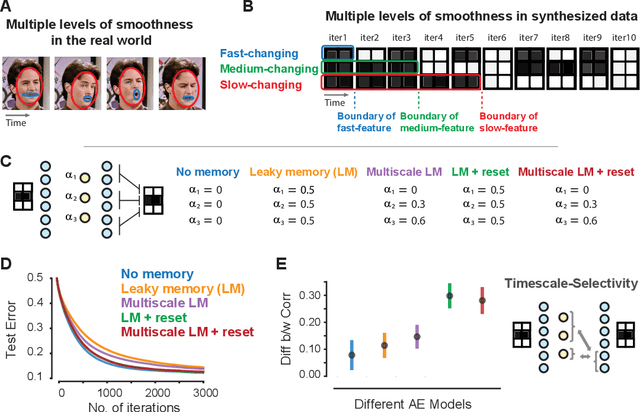
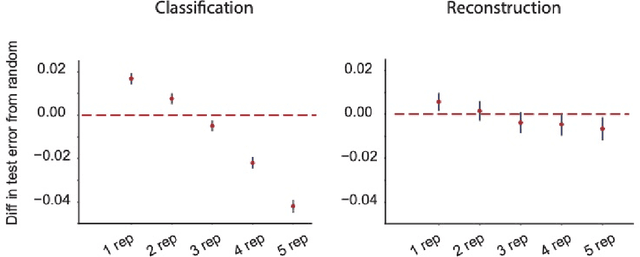
Events in the real world are correlated across nearby points in time, and we must learn from this temporally smooth data. However, when neural networks are trained to categorize or reconstruct single items, the common practice is to randomize the order of training items. What are the effects of temporally smooth training data on the efficiency of learning? We first tested the effects of smoothness in training data on incremental learning in feedforward nets and found that smoother data slowed learning. Moreover, sampling so as to minimize temporal smoothness produced more efficient learning than sampling randomly. If smoothness generally impairs incremental learning, then how can networks be modified to benefit from smoothness in the training data? We hypothesized that two simple brain-inspired mechanisms, leaky memory in activation units and memory-gating, could enable networks to rapidly extract useful representations from smooth data. Across all levels of data smoothness, these brain-inspired architectures achieved more efficient category learning than feedforward networks. This advantage persisted, even when leaky memory networks with gating were trained on smooth data and tested on randomly-ordered data. Finally, we investigated how these brain-inspired mechanisms altered the internal representations learned by the networks. We found that networks with multi-scale leaky memory and memory-gating could learn internal representations that un-mixed data sources which vary on fast and slow timescales across training samples. Altogether, we identified simple mechanisms enabling neural networks to learn more quickly from temporally smooth data, and to generate internal representations that separate timescales in the training signal.
Object Permanence Through Audio-Visual Representations
Oct 20, 2020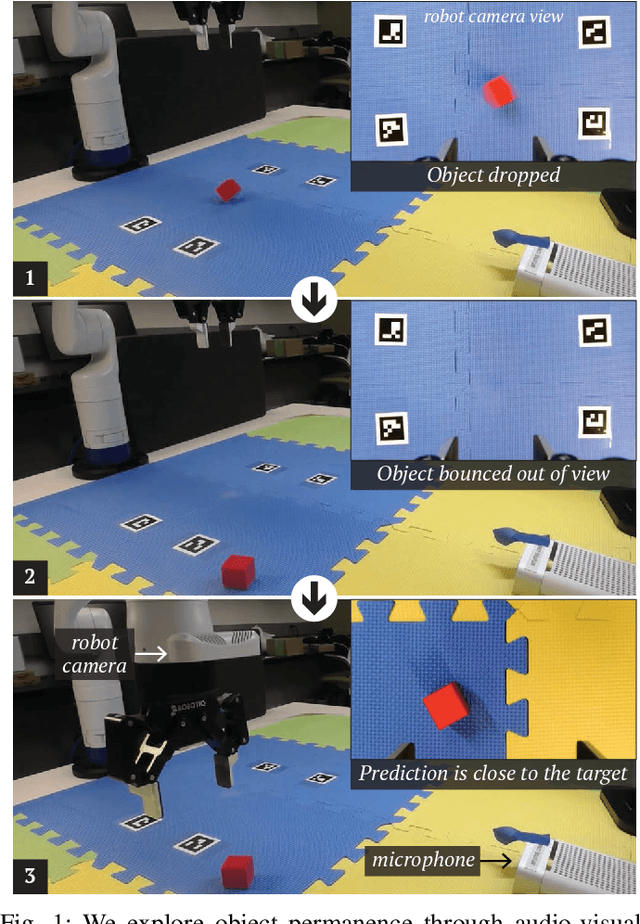
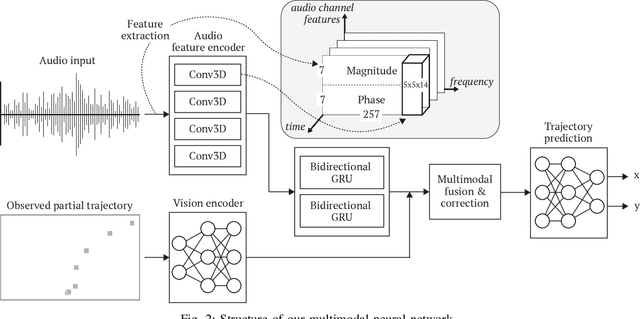
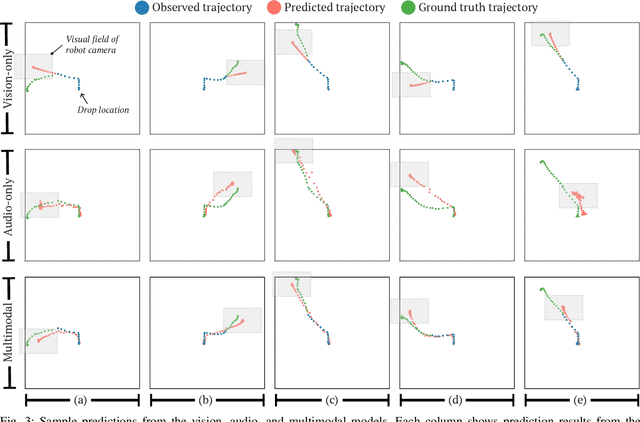
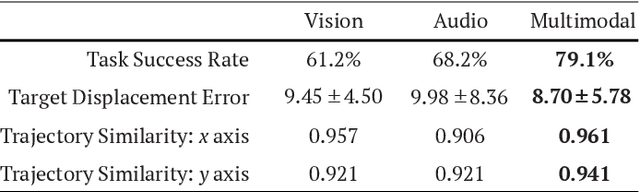
As robots perform manipulation tasks and interact with objects, it is probable that they accidentally drop objects that subsequently bounce out of their visual fields (e.g., due to an inadequate grasp of an unfamiliar object). To enable robots to recover from such errors, we draw upon the concept of object permanence---objects remain in existence even when they are not being sensed (e.g., seen) directly. In particular, we developed a multimodal neural network model---using a partial, observed bounce trajectory and the audio resulting from drop impact as its inputs---to predict the full bounce trajectory and the end location of a dropped object. We empirically show that: (1) our multimodal method predicted end locations close in proximity (i.e., within the visual field of the robot's wrist camera) to the actual locations and (2) the robot was able to retrieve dropped objects by applying minimal vision-based pick-up adjustments. Additionally, we show that our multimodal method outperformed the vision-only and audio-only baselines in retrieving dropped objects. Our results provide insights in enabling object permanence for robots and offer foundations for ensuring robust robot autonomy in task execution.