 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-Robot Commensality: Bite Timing Prediction for Robot-Assisted Feeding in Groups
Jul 07, 2022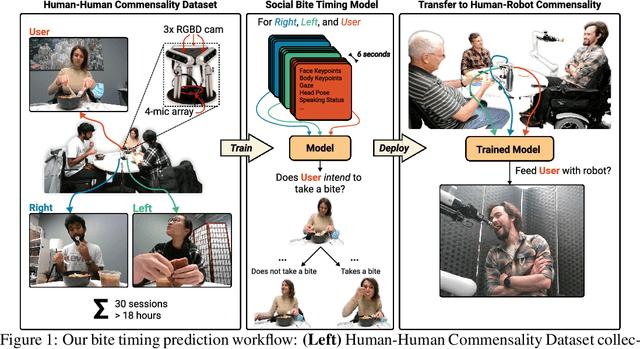
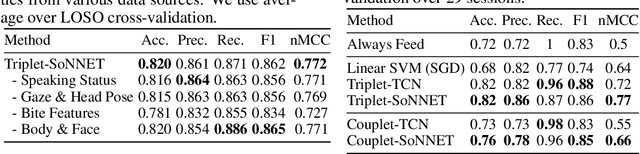
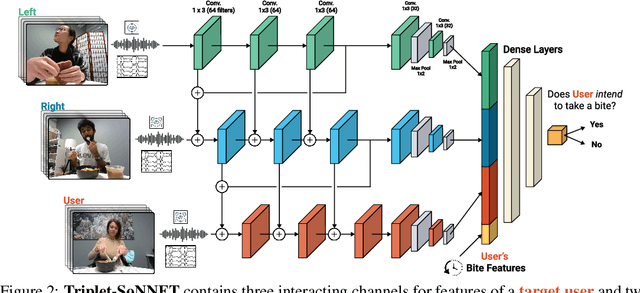
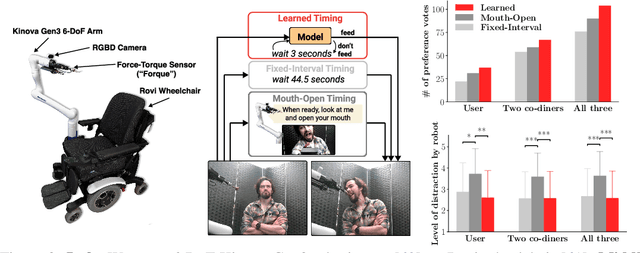
We develop data-driven models to predict when a robot should feed during social dining scenarios. Being able to eat independently with friends and family is considered one of the most memorable and important activities for people with mobility limitations. Robots can potentially help with this activity but robot-assisted feeding is a multi-faceted problem with challenges in bite acquisition, bite timing, and bite transfer. Bite timing in particular becomes uniquely challenging in social dining scenarios due to the possibility of interrupting a social human-robot group interaction during commensality. Our key insight is that bite timing strategies that take into account the delicate balance of social cues can lead to seamless interactions during robot-assisted feeding in a social dining scenario. We approach this problem by collecting a multimodal Human-Human Commensality Dataset (HHCD) containing 30 groups of three people eating together. We use this dataset to analyze human-human commensality behaviors and develop bite timing prediction models in social dining scenarios. We also transfer these models to human-robot commensality scenarios. Our user studies show that prediction improves when our algorithm uses multimodal social signaling cues between diners to model bite timing. The HHCD dataset, videos of user studies, and code will be publicly released after acceptance.