 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTemporal-Spatial Entropy Balancing for Causal Continuous Treatment-Effect Estimation
Dec 19, 2023In the field of intracity freight transportation, changes in order volume are significantly influenced by temporal and spatial factors. When building subsidy and pricing strategies, predicting the causal effects of these strategies on order volume is crucial. In the process of calculating causal effects, confounding variables can have an impact. Traditional methods to control confounding variables handle data from a holistic perspective, which cannot ensure the precision of causal effects in specific temporal and spatial dimensions. However, temporal and spatial dimensions are extremely critical in the logistics field, and this limitation may directly affect the precision of subsidy and pricing strategies. To address these issues, this study proposes a technique based on flexible temporal-spatial grid partitioning. Furthermore, based on the flexible grid partitioning technique, we further propose a continuous entropy balancing method in the temporal-spatial domain, which named TS-EBCT (Temporal-Spatial Entropy Balancing for Causal Continue Treatments). The method proposed in this paper has been tested on two simulation datasets and two real datasets, all of which have achieved excellent performance. In fact, after applying the TS-EBCT method to the intracity freight transportation field, the prediction accuracy of the causal effect has been significantly improved. It brings good business benefits to the company's subsidy and pricing strategies.
Integrated Sensing and Communication for Network-Assisted Full-Duplex Cell-Free Distributed Massive MIMO Systems
Nov 13, 2023



In this paper, we combine the network-assisted full-duplex (NAFD) technology and distributed radar sensing to implement integrated sensing and communication (ISAC). The ISAC system features both uplink and downlink remote radio units (RRUs) equipped with communication and sensing capabilities. We evaluate the communication and sensing performance of the system using the sum communication rates and the Cramer-Rao lower bound (CRLB), respectively. We compare the performance of the proposed scheme with other ISAC schemes, the result shows that the proposed scheme can provide more stable sensing and better communication performance. Furthermore, we propose two power allocation algorithms to optimize the communication and sensing performance jointly. One algorithm is based on the deep Q-network (DQN) and the other one is based on the non-dominated sorting genetic algorithm II (NSGA-II). The proposed algorithms provide more feasible solutions and achieve better system performance than the equal power allocation algorithm.
Passive Integrated Sensing and Communication Scheme based on RF Fingerprint Information Extraction for Cell-Free RAN
Nov 10, 2023This paper investigates how to achieve integrated sensing and communication (ISAC) based on a cell-free radio access network (CF-RAN) architecture with a minimum footprint of communication resources. We propose a new passive sensing scheme. The scheme is based on the radio frequency (RF) fingerprint learning of the RF radio unit (RRU) to build an RF fingerprint library of RRUs. The source RRU is identified by comparing the RF fingerprints carried by the signal at the receiver side. The receiver extracts the channel parameters from the signal and estimates the channel environment, thus locating the reflectors in the environment. The proposed scheme can effectively solve the problem of interference between signals in the same time-frequency domain but in different spatial domains when multiple RRUs jointly serve users in CF-RAN architecture. Simulation results show that the proposed passive ISAC scheme can effectively detect reflector location information in the environment without degrading the communication performance.
LookUP: Vision-Only Real-Time Precise Underground Localisation for Autonomous Mining Vehicles
Mar 20, 2019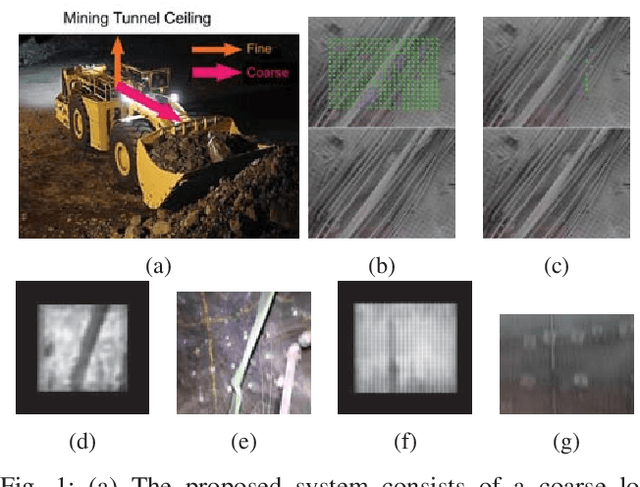
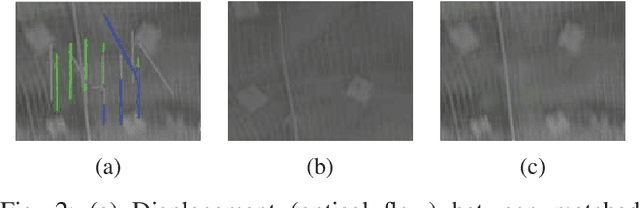
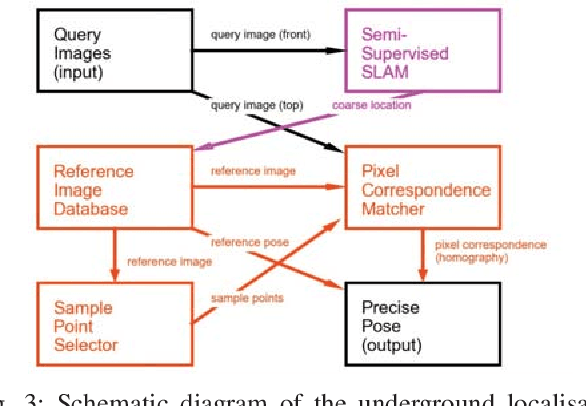
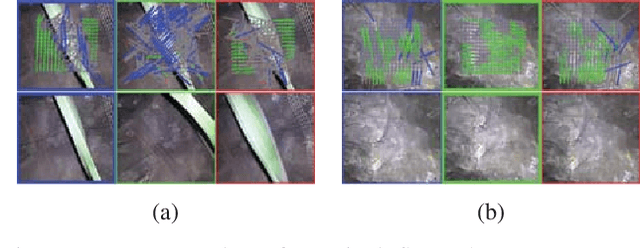
A key capability for autonomous underground mining vehicles is real-time accurate localisation. While significant progress has been made, currently deployed systems have several limitations ranging from dependence on costly additional infrastructure to failure of both visual and range sensor-based techniques in highly aliased or visually challenging environments. In our previous work, we presented a lightweight coarse vision-based localisation system that could map and then localise to within a few metres in an underground mining environment. However, this level of precision is insufficient for providing a cheaper, more reliable vision-based automation alternative to current range sensor-based systems. Here we present a new precision localisation system dubbed "LookUP", which learns a neural-network-based pixel sampling strategy for estimating homographies based on ceiling-facing cameras without requiring any manual labelling. This new system runs in real time on limited computation resource and is demonstrated on two different underground mine sites, achieving real time performance at ~5 frames per second and a much improved average localisation error of ~1.2 metre.