 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty Calibration and its Application to Object Detection
Feb 06, 2023Image-based environment perception is an important component especially for driver assistance systems or autonomous driving. In this scope, modern neuronal networks are used to identify multiple objects as well as the according position and size information within a single frame. The performance of such an object detection model is important for the overall performance of the whole system. However, a detection model might also predict these objects under a certain degree of uncertainty. [...] In this work, we examine the semantic uncertainty (which object type?) as well as the spatial uncertainty (where is the object and how large is it?). We evaluate if the predicted uncertainties of an object detection model match with the observed error that is achieved on real-world data. In the first part of this work, we introduce the definition for confidence calibration of the semantic uncertainty in the context of object detection, instance segmentation, and semantic segmentation. We integrate additional position information in our examinations to evaluate the effect of the object's position on the semantic calibration properties. Besides measuring calibration, it is also possible to perform a post-hoc recalibration of semantic uncertainty that might have turned out to be miscalibrated. [...] The second part of this work deals with the spatial uncertainty obtained by a probabilistic detection model. [...] We review and extend common calibration methods so that it is possible to obtain parametric uncertainty distributions for the position information in a more flexible way. In the last part, we demonstrate a possible use-case for our derived calibration methods in the context of object tracking. [...] We integrate our previously proposed calibration techniques and demonstrate the usefulness of semantic and spatial uncertainty calibration in a subsequent process. [...]
Parametric and Multivariate Uncertainty Calibration for Regression and Object Detection
Jul 04, 2022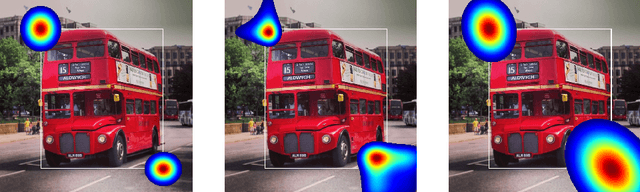
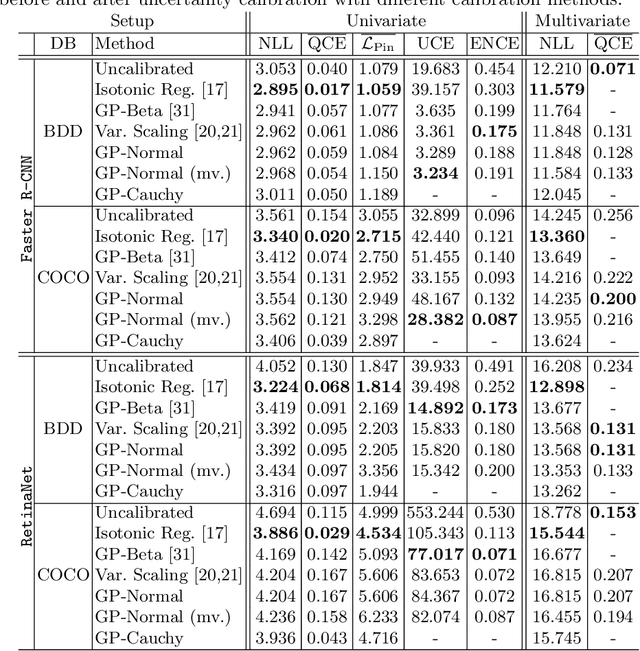
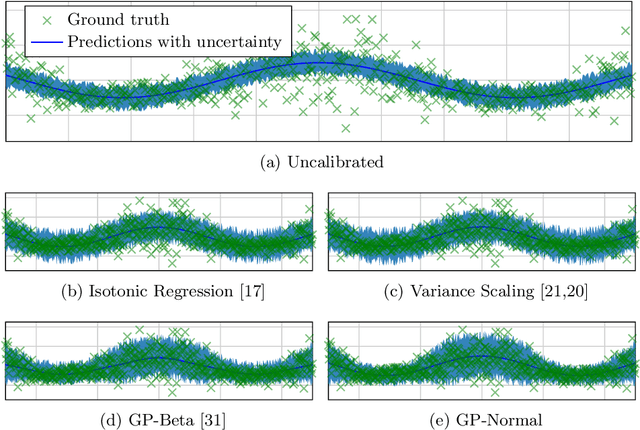
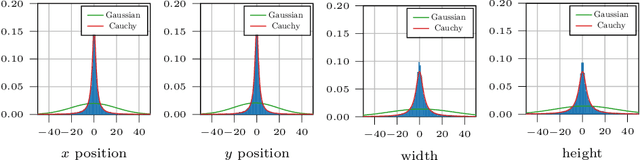
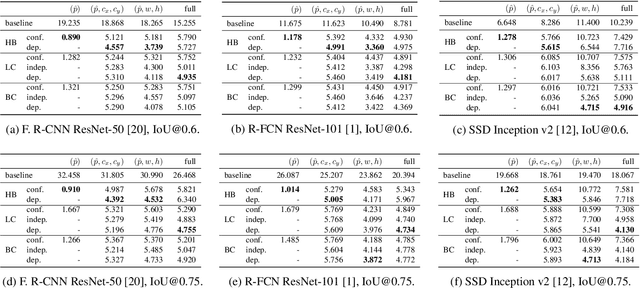
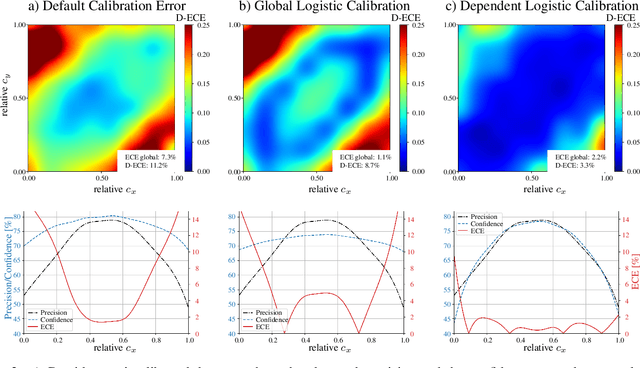
Reliable spatial uncertainty evaluation of object detection models is of special interest and has been subject of recent work. In this work, we review the existing definitions for uncertainty calibration of probabilistic regression tasks. We inspect the calibration properties of common detection networks and extend state-of-the-art recalibration methods. Our methods use a Gaussian process (GP) recalibration scheme that yields parametric distributions as output (e.g. Gaussian or Cauchy). The usage of GP recalibration allows for a local (conditional) uncertainty calibration by capturing dependencies between neighboring samples. The use of parametric distributions such as as Gaussian allows for a simplified adaption of calibration in subsequent processes, e.g., for Kalman filtering in the scope of object tracking. In addition, we use the GP recalibration scheme to perform covariance estimation which allows for post-hoc introduction of local correlations between the output quantities, e.g., position, width, or height in object detection. To measure the joint calibration of multivariate and possibly correlated data, we introduce the quantile calibration error which is based on the Mahalanobis distance between the predicted distribution and the ground truth to determine whether the ground truth is within a predicted quantile. Our experiments show that common detection models overestimate the spatial uncertainty in comparison to the observed error. We show that the simple Isotonic Regression recalibration method is sufficient to achieve a good uncertainty quantification in terms of calibrated quantiles. In contrast, if normal distributions are required for subsequent processes, our GP-Normal recalibration method yields the best results. Finally, we show that our covariance estimation method is able to achieve best calibration results for joint multivariate calibration.
Confidence Calibration for Object Detection and Segmentation
Mar 02, 2022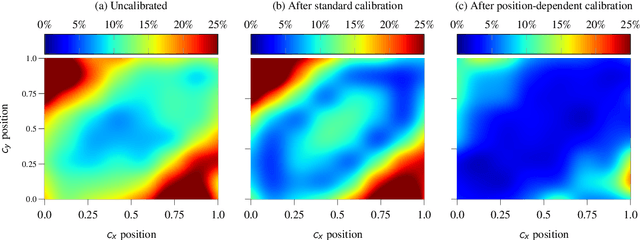
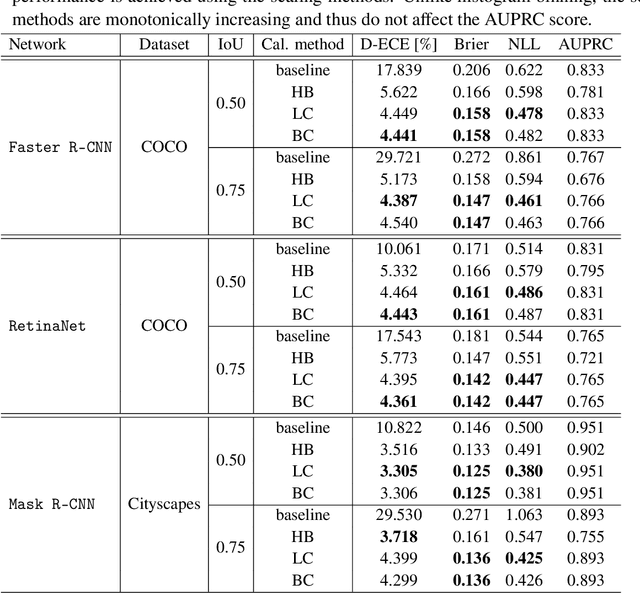
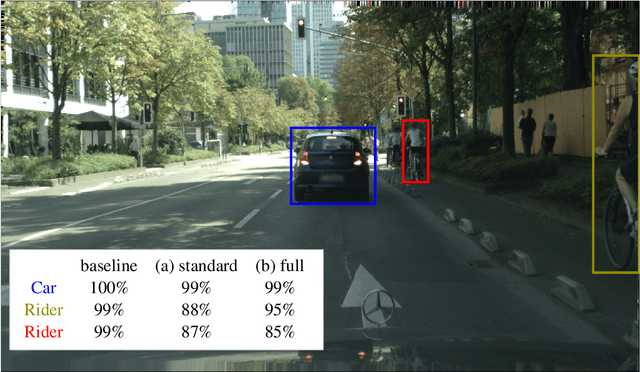
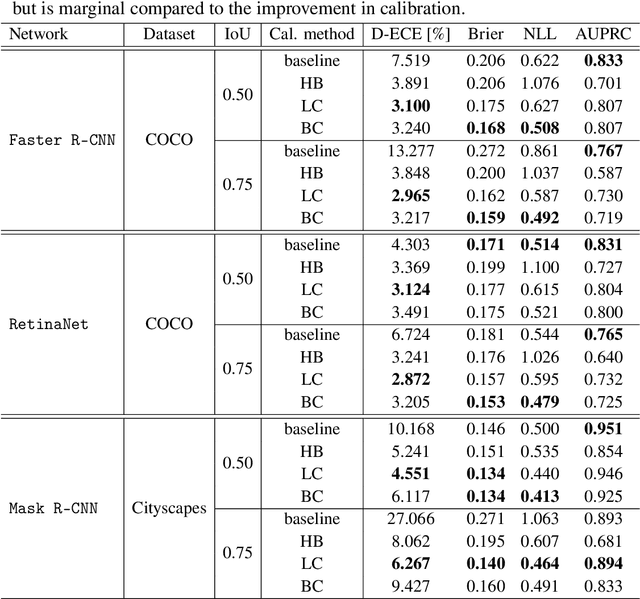
Calibrated confidence estimates obtained from neural networks are crucial, particularly for safety-critical applications such as autonomous driving or medical image diagnosis. However, although the task of confidence calibration has been investigated on classification problems, thorough investigations on object detection and segmentation problems are still missing. Therefore, we focus on the investigation of confidence calibration for object detection and segmentation models in this chapter. We introduce the concept of multivariate confidence calibration that is an extension of well-known calibration methods to the task of object detection and segmentation. This allows for an extended confidence calibration that is also aware of additional features such as bounding box/pixel position, shape information, etc. Furthermore, we extend the expected calibration error (ECE) to measure miscalibration of object detection and segmentation models. We examine several network architectures on MS COCO as well as on Cityscapes and show that especially object detection as well as instance segmentation models are intrinsically miscalibrated given the introduced definition of calibration. Using our proposed calibration methods, we have been able to improve calibration so that it also has a positive impact on the quality of segmentation masks as well.
Bayesian Confidence Calibration for Epistemic Uncertainty Modelling
Sep 21, 2021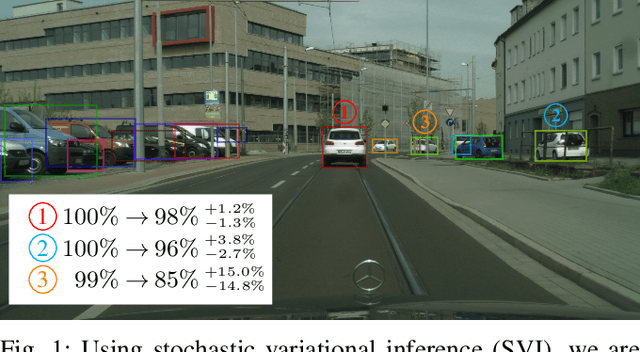
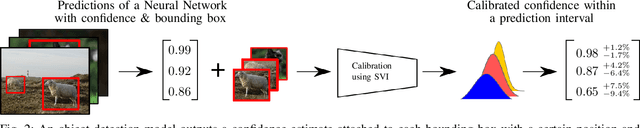
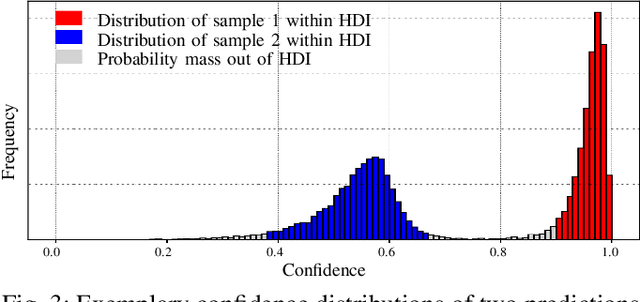
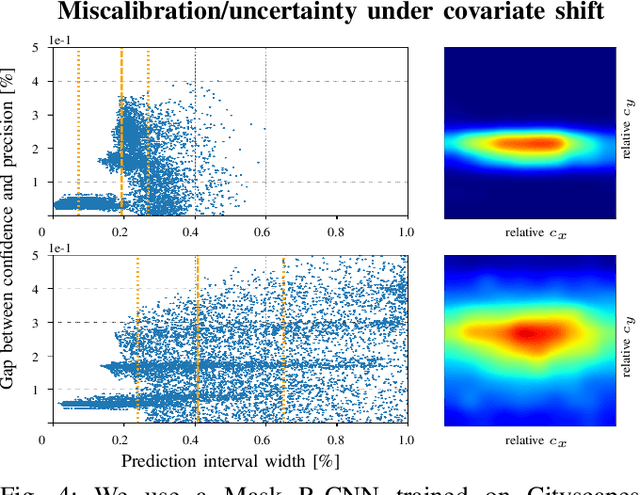
Modern neural networks have found to be miscalibrated in terms of confidence calibration, i.e., their predicted confidence scores do not reflect the observed accuracy or precision. Recent work has introduced methods for post-hoc confidence calibration for classification as well as for object detection to address this issue. Especially in safety critical applications, it is crucial to obtain a reliable self-assessment of a model. But what if the calibration method itself is uncertain, e.g., due to an insufficient knowledge base? We introduce Bayesian confidence calibration - a framework to obtain calibrated confidence estimates in conjunction with an uncertainty of the calibration method. Commonly, Bayesian neural networks (BNN) are used to indicate a network's uncertainty about a certain prediction. BNNs are interpreted as neural networks that use distributions instead of weights for inference. We transfer this idea of using distributions to confidence calibration. For this purpose, we use stochastic variational inference to build a calibration mapping that outputs a probability distribution rather than a single calibrated estimate. Using this approach, we achieve state-of-the-art calibration performance for object detection calibration. Finally, we show that this additional type of uncertainty can be used as a sufficient criterion for covariate shift detection. All code is open source and available at https://github.com/EFS-OpenSource/calibration-framework.
Inspect, Understand, Overcome: A Survey of Practical Methods for AI Safety
Apr 29, 2021The use of deep neural networks (DNNs) in safety-critical applications like mobile health and autonomous driving is challenging due to numerous model-inherent shortcomings. These shortcomings are diverse and range from a lack of generalization over insufficient interpretability to problems with malicious inputs. Cyber-physical systems employing DNNs are therefore likely to suffer from safety concerns. In recent years, a zoo of state-of-the-art techniques aiming to address these safety concerns has emerged. This work provides a structured and broad overview of them. We first identify categories of insufficiencies to then describe research activities aiming at their detection, quantification, or mitigation. Our paper addresses both machine learning experts and safety engineers: The former ones might profit from the broad range of machine learning topics covered and discussions on limitations of recent methods. The latter ones might gain insights into the specifics of modern ML methods. We moreover hope that our contribution fuels discussions on desiderata for ML systems and strategies on how to propel existing approaches accordingly.
From Black-box to White-box: Examining Confidence Calibration under different Conditions
Jan 08, 2021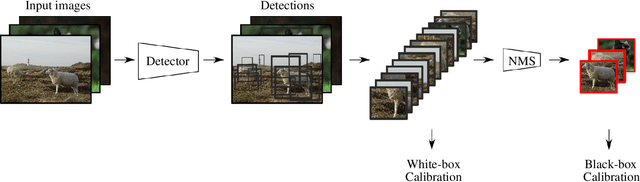
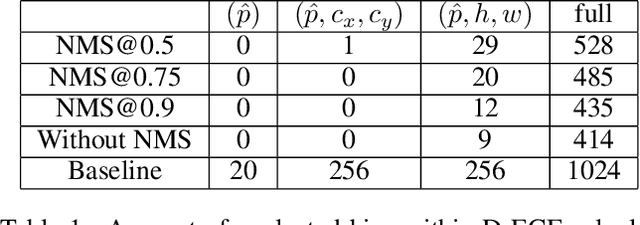

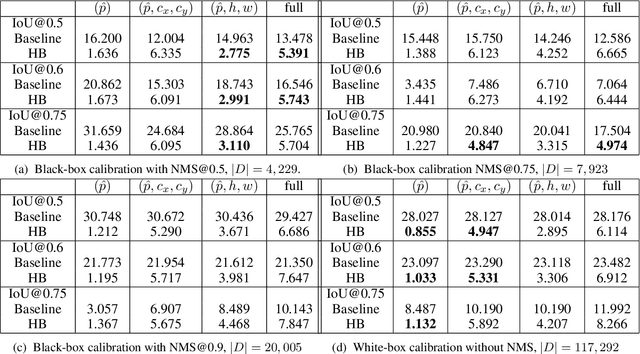
Confidence calibration is a major concern when applying artificial neural networks in safety-critical applications. Since most research in this area has focused on classification in the past, confidence calibration in the scope of object detection has gained more attention only recently. Based on previous work, we study the miscalibration of object detection models with respect to image location and box scale. Our main contribution is to additionally consider the impact of box selection methods like non-maximum suppression to calibration. We investigate the default intrinsic calibration of object detection models and how it is affected by these post-processing techniques. For this purpose, we distinguish between black-box calibration with non-maximum suppression and white-box calibration with raw network outputs. Our experiments reveal that post-processing highly affects confidence calibration. We show that non-maximum suppression has the potential to degrade initially well-calibrated predictions, leading to overconfident and thus miscalibrated models.
Multivariate Confidence Calibration for Object Detection
Apr 28, 2020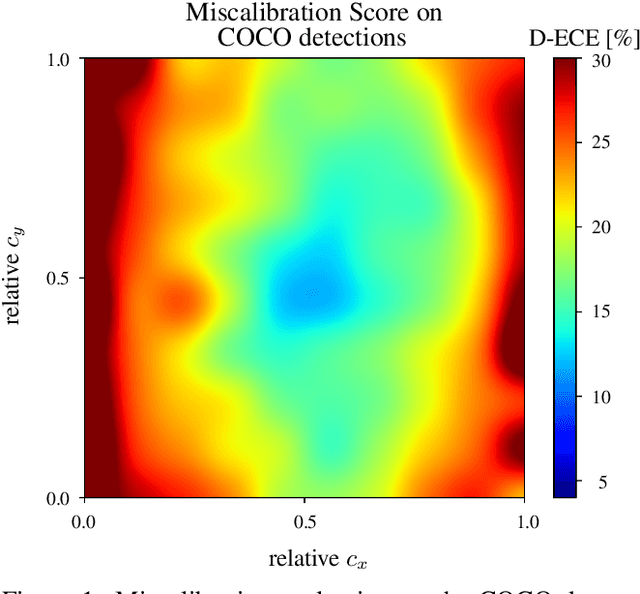

Unbiased confidence estimates of neural networks are crucial especially for safety-critical applications. Many methods have been developed to calibrate biased confidence estimates. Though there is a variety of methods for classification, the field of object detection has not been addressed yet. Therefore, we present a novel framework to measure and calibrate biased (or miscalibrated) confidence estimates of object detection methods. The main difference to related work in the field of classifier calibration is that we also use additional information of the regression output of an object detector for calibration. Our approach allows, for the first time, to obtain calibrated confidence estimates with respect to image location and box scale. In addition, we propose a new measure to evaluate miscalibration of object detectors. Finally, we show that our developed methods outperform state-of-the-art calibration models for the task of object detection and provides reliable confidence estimates across different locations and scales.