 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutoDecoding Latent 3D Diffusion Models
Jul 07, 2023We present a novel approach to the generation of static and articulated 3D assets that has a 3D autodecoder at its core. The 3D autodecoder framework embeds properties learned from the target dataset in the latent space, which can then be decoded into a volumetric representation for rendering view-consistent appearance and geometry. We then identify the appropriate intermediate volumetric latent space, and introduce robust normalization and de-normalization operations to learn a 3D diffusion from 2D images or monocular videos of rigid or articulated objects. Our approach is flexible enough to use either existing camera supervision or no camera information at all -- instead efficiently learning it during training. Our evaluations demonstrate that our generation results outperform state-of-the-art alternatives on various benchmark datasets and metrics, including multi-view image datasets of synthetic objects, real in-the-wild videos of moving people, and a large-scale, real video dataset of static objects.
StyleGenes: Discrete and Efficient Latent Distributions for GANs
Apr 30, 2023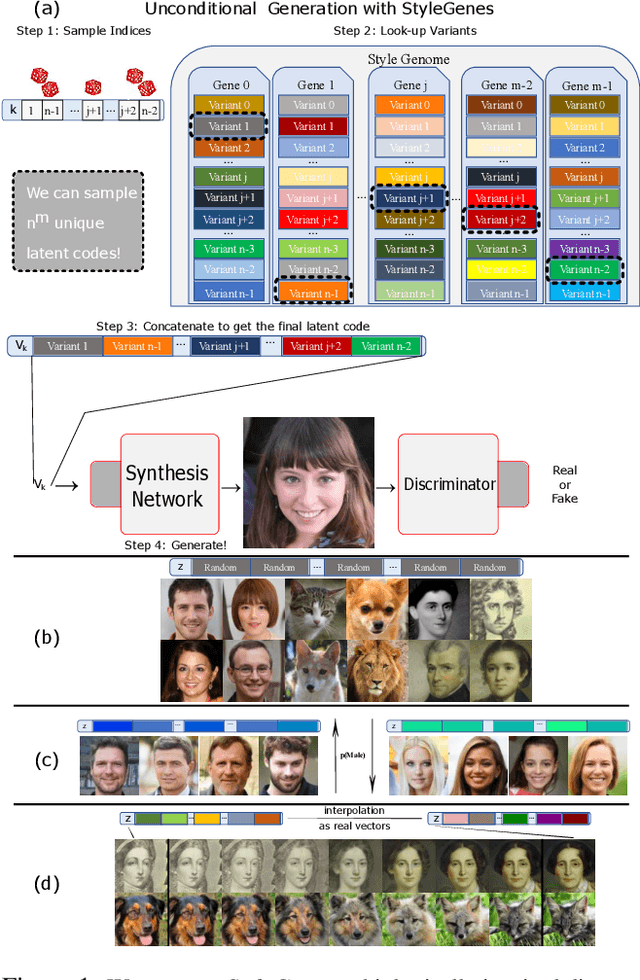



We propose a discrete latent distribution for Generative Adversarial Networks (GANs). Instead of drawing latent vectors from a continuous prior, we sample from a finite set of learnable latents. However, a direct parametrization of such a distribution leads to an intractable linear increase in memory in order to ensure sufficient sample diversity. We address this key issue by taking inspiration from the encoding of information in biological organisms. Instead of learning a separate latent vector for each sample, we split the latent space into a set of genes. For each gene, we train a small bank of gene variants. Thus, by independently sampling a variant for each gene and combining them into the final latent vector, our approach can represent a vast number of unique latent samples from a compact set of learnable parameters. Interestingly, our gene-inspired latent encoding allows for new and intuitive approaches to latent-space exploration, enabling conditional sampling from our unconditionally trained model. Moreover, our approach preserves state-of-the-art photo-realism while achieving better disentanglement than the widely-used StyleMapping network.
NeRF-GAN Distillation for Efficient 3D-Aware Generation with Convolutions
Mar 22, 2023



Pose-conditioned convolutional generative models struggle with high-quality 3D-consistent image generation from single-view datasets, due to their lack of sufficient 3D priors. Recently, the integration of Neural Radiance Fields (NeRFs) and generative models, such as Generative Adversarial Networks (GANs), has transformed 3D-aware generation from single-view images. NeRF-GANs exploit the strong inductive bias of 3D neural representations and volumetric rendering at the cost of higher computational complexity. This study aims at revisiting pose-conditioned 2D GANs for efficient 3D-aware generation at inference time by distilling 3D knowledge from pretrained NeRF-GANS. We propose a simple and effective method, based on re-using the well-disentangled latent space of a pre-trained NeRF-GAN in a pose-conditioned convolutional network to directly generate 3D-consistent images corresponding to the underlying 3D representations. Experiments on several datasets demonstrate that the proposed method obtains results comparable with volumetric rendering in terms of quality and 3D consistency while benefiting from the superior computational advantage of convolutional networks. The code will be available at: https://github.com/mshahbazi72/NeRF-GAN-Distillation
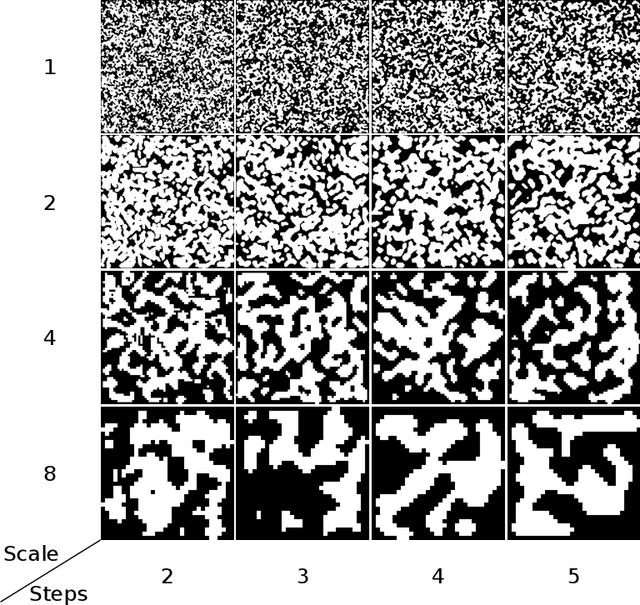
Arbitrary-Scale Image Synthesis
Apr 05, 2022Positional encodings have enabled recent works to train a single adversarial network that can generate images of different scales. However, these approaches are either limited to a set of discrete scales or struggle to maintain good perceptual quality at the scales for which the model is not trained explicitly. We propose the design of scale-consistent positional encodings invariant to our generator's layers transformations. This enables the generation of arbitrary-scale images even at scales unseen during training. Moreover, we incorporate novel inter-scale augmentations into our pipeline and partial generation training to facilitate the synthesis of consistent images at arbitrary scales. Lastly, we show competitive results for a continuum of scales on various commonly used datasets for image synthesis.
SkyCam: A Dataset of Sky Images and their Irradiance values
May 06, 2021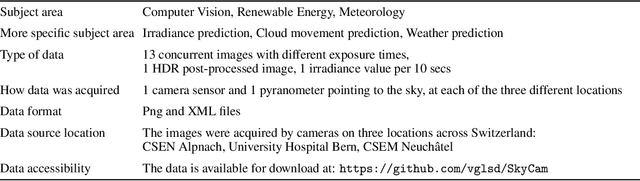
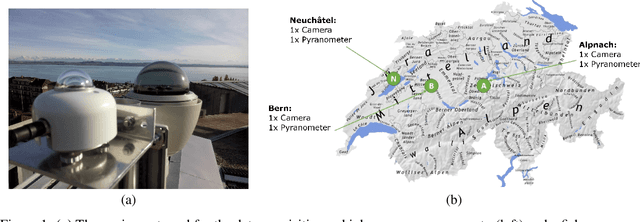
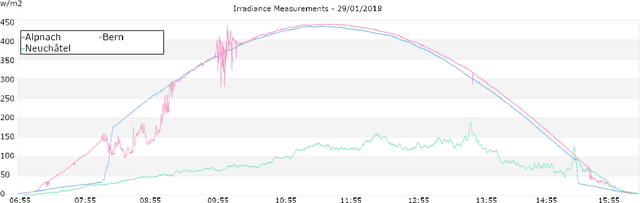
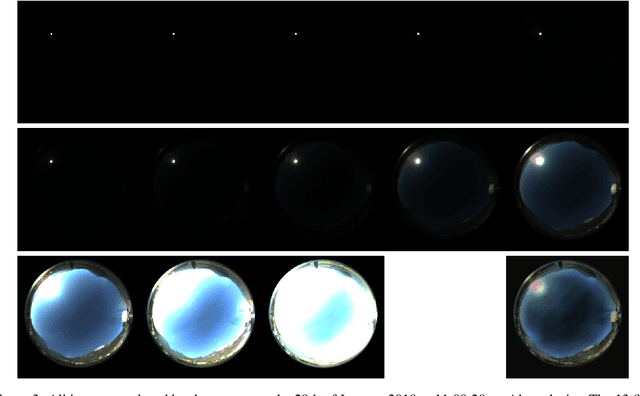
Recent advances in Computer Vision and Deep Learning have enabled astonishing results in a variety of fields and applications. Motivated by this success, the SkyCam Dataset aims to enable image-based Deep Learning solutions for short-term, precise prediction of solar radiation on a local level. For the span of a year, three different cameras in three topographically different locations in Switzerland are acquiring images of the sky every 10 seconds. Thirteen high resolution images with different exposure times are captured and used to create an additional HDR image. The images are paired with highly precise irradiance values gathered from a high-accuracy pyranometer.
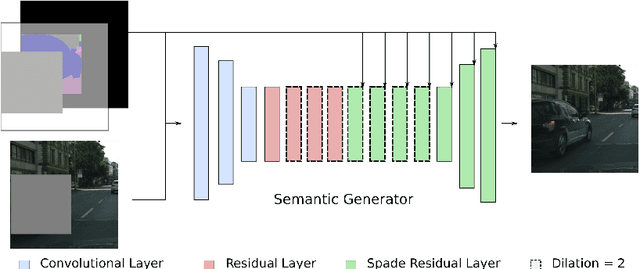
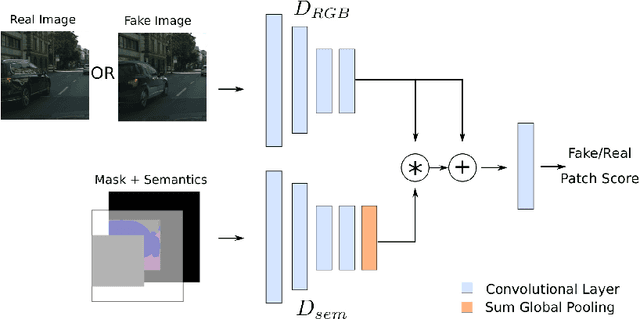
AIM 2020 Challenge on Image Extreme Inpainting
Oct 02, 2020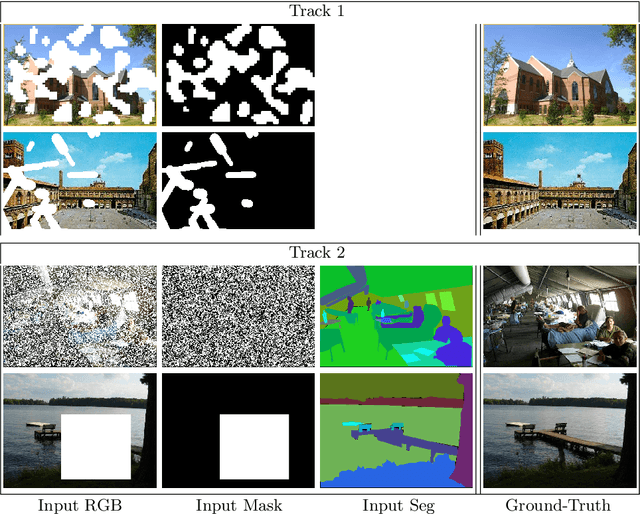
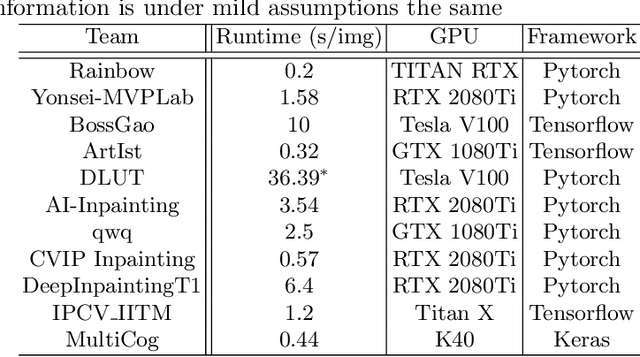
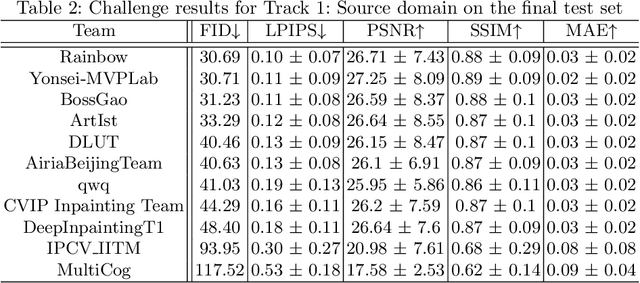
This paper reviews the AIM 2020 challenge on extreme image inpainting. This report focuses on proposed solutions and results for two different tracks on extreme image inpainting: classical image inpainting and semantically guided image inpainting. The goal of track 1 is to inpaint considerably large part of the image using no supervision but the context. Similarly, the goal of track 2 is to inpaint the image by having access to the entire semantic segmentation map of the image to inpaint. The challenge had 88 and 74 participants, respectively. 11 and 6 teams competed in the final phase of the challenge, respectively. This report gauges current solutions and set a benchmark for future extreme image inpainting methods.
SESAME: Semantic Editing of Scenes by Adding, Manipulating or Erasing Objects
Apr 10, 2020

Recent advances in image generation gave rise to powerful tools for semantic image editing. However, existing approaches can either operate on a single image or require an abundance of additional information. They are not capable of handling the complete set of editing operations, that is addition, manipulation or removal of semantic concepts. To address these limitations, we propose SESAME, a novel generator-discriminator pair for Semantic Editing of Scenes by Adding, Manipulating or Erasing objects. In our setup, the user provides the semantic labels of the areas to be edited and the generator synthesizes the corresponding pixels. In contrast to previous methods that employ a discriminator that trivially concatenates semantics and image as an input, the SESAME discriminator is composed of two input streams that independently process the image and its semantics, using the latter to manipulate the results of the former. We evaluate our model on a diverse set of datasets and report state-of-the-art performance on two tasks: (a) image manipulation and (b) image generation conditioned on semantic labels.