 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLong-Horizon Geometry-Aware Navigation among Polytopes via MILP-MPC and Minkowski-Based CBFs
Mar 31, 2026Autonomous navigation in complex, non-convex environments remains challenging when robot dynamics, control limits, and exact robot geometry must all be taken into account. In this paper, we propose a hierarchical planning and control framework that bridges long-horizon guidance and geometry-aware safety guarantees for a polytopic robot navigating among polytopic obstacles. At the high level, Mixed-Integer Linear Programming (MILP) is embedded within a Model Predictive Control (MPC) framework to generate a nominal trajectory around polytopic obstacles while modeling the robot as a point mass for computational tractability. At the low level, we employ a control barrier function (CBF) based on the exact signed distance in the Minkowski-difference space as a safety filter to explicitly enforce the geometric constraints of the robot shape, and further extend its formulation to a high-order CBF (HOCBF). We demonstrate the proposed framework in U-shaped and maze-like environments under single- and double-integrator dynamics. The results show that the proposed architecture mitigates the topology-induced local-minimum behavior of purely reactive CBF-based navigation while enabling safe, real-time, geometry-aware navigation.
Control and State Estimation of Vehicle-Mounted Aerial Systems in GPS-Denied, Non-Inertial Environments
Feb 03, 2026We present a robust control and estimation framework for quadrotors operating in Global Navigation Satellite System(GNSS)-denied, non-inertial environments where inertial sensors such as Inertial Measurement Units (IMUs) become unreliable due to platform-induced accelerations. In such settings, conventional estimators fail to distinguish whether the measured accelerations arise from the quadrotor itself or from the non-inertial platform, leading to drift and control degradation. Unlike conventional approaches that depend heavily on IMU and GNSS, our method relies exclusively on external position measurements combined with a Extended Kalman Filter with Unknown Inputs (EKF-UI) to account for platform motion. The estimator is paired with a cascaded PID controller for full 3D tracking. To isolate estimator performance from localization errors, all tests are conducted using high-precision motion capture systems. Experimental results in a moving-cart testbed validate our approach under both translational in X-axis and Y-axis dissonance. Compared to standard EKF, the proposed method significantly improves stability and trajectory tracking without requiring inertial feedback, enabling practical deployment on moving platforms such as trucks or elevators.
On the Stabilization of Rigid Formations on Regular Curves
Dec 11, 2025This work deals with the problem of stabilizing a multi-agent rigid formation on a general class of planar curves. Namely, we seek to stabilize an equilateral polygonal formation on closed planar differentiable curves after a path sweep. The task of finding an inscribed regular polygon centered at the point of interest is solved via a randomized multi-start Newton-Like algorithm for which one is able to ascertain the existence of a minimizer. Then we design a continuous feedback law that guarantees convergence to, and sufficient sweeping of the curve, followed by convergence to the desired formation vertices while ensuring inter-agent avoidance. The proposed approach is validated through numerical simulations for different classes of curves and different rigid formations. Code: https://github.com/mebbaid/paper-elobaid-ifacwc-2026
The Dodecacopter: a Versatile Multirotor System of Dodecahedron-Shaped Modules
Apr 23, 2025



With the promise of greater safety and adaptability, modular reconfigurable uncrewed air vehicles have been proposed as unique, versatile platforms holding the potential to replace multiple types of monolithic vehicles at once. State-of-the-art rigidly assembled modular vehicles are generally two-dimensional configurations in which the rotors are coplanar and assume the shape of a "flight array". We introduce the Dodecacopter, a new type of modular rotorcraft where all modules take the shape of a regular dodecahedron, allowing the creation of richer sets of configurations beyond flight arrays. In particular, we show how the chosen module design can be used to create three-dimensional and fully actuated configurations. We justify the relevance of these types of configurations in terms of their structural and actuation properties with various performance indicators. Given the broad range of configurations and capabilities that can be achieved with our proposed design, we formulate tractable optimization programs to find optimal configurations given structural and actuation constraints. Finally, a prototype of such a vehicle is presented along with results of performed flights in multiple configurations.
Towards a Robust Soft Baby Robot With Rich Interaction Ability for Advanced Machine Learning Algorithms
Apr 11, 2024Artificial intelligence has made great strides in many areas lately, yet it has had comparatively little success in general-use robotics. We believe one of the reasons for this is the disconnect between traditional robotic design and the properties needed for open-ended, creativity-based AI systems. To that end, we, taking selective inspiration from nature, build a robust, partially soft robotic limb with a large action space, rich sensory data stream from multiple cameras, and the ability to connect with others to enhance the action space and data stream. As a proof of concept, we train two contemporary machine learning algorithms to perform a simple target-finding task. Altogether, we believe that this design serves as a first step to building a robot tailor-made for achieving artificial general intelligence.
Modeling and Experimental Validation of a Fractal Tetrahedron UAS Assembly
Mar 16, 2020

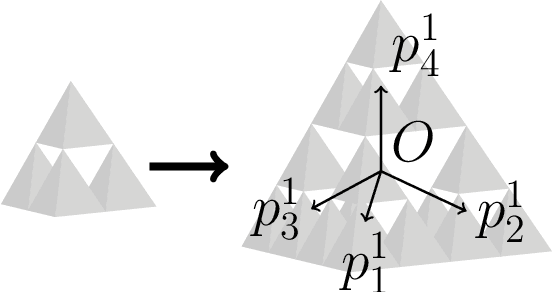

This paper presents the foundation of a modular robotic system comprised of several novel modules in the shape of a tetrahedron. Four single-propeller submodules are assembled to create the Tetracopter, a tetrahedron-shaped quad-rotorcraft used as the elementary module of a modular flying system. This modular flying system is built by assembling the different elementary modules in a fractal shape. The fractal tetrahedron structure of the modular flying assembly grants the vehicle more rigidity than a conventional two-dimensional modular robotic flight system while maintaining the relative efficiency of a two-dimensional modular robotic flight system. A prototype of the Tetracopter has been modeled, fabricated, and successfully flight-tested by the Decision and Control Laboratory at the Georgia Institute of Technology. The results of this research set the foundation for the development of Tetrahedron rotorcraft that can maintain controllable flight and assemble in flight to create a Fractal Tetrahedron Assembly.
Modeling and Experimental Validation of the Mechanics of a Wheeled Non-Holonomic Robot Capable of Enabling Homeostasis
Sep 25, 2019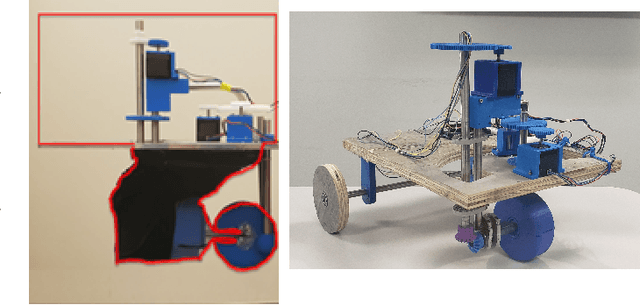
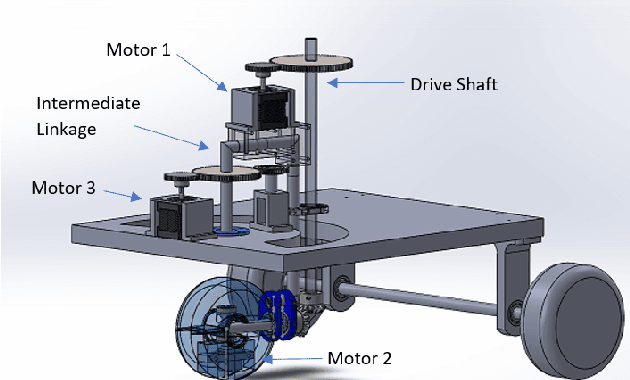
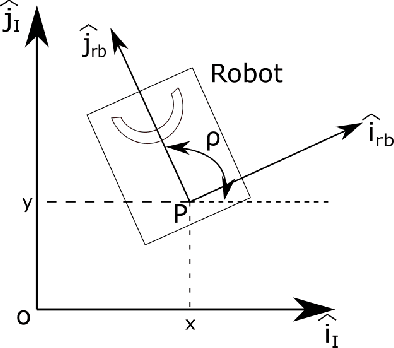
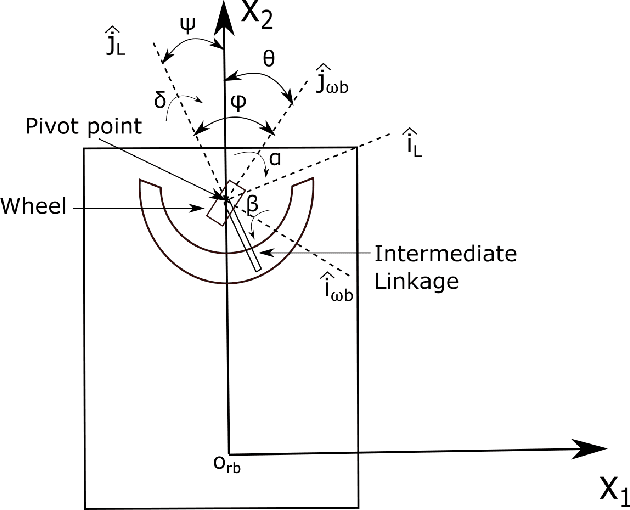
The field of bio-inspired robotics seeks to create mechanical systems that mimic the designs and concepts used by biological systems. One of the more challenging biological concepts to imitate in mechanical systems is the ability to create an internal environment that can foster homeostasis through the use of a membrane similar to skin. A robot with this ability would be able to regulate internal parameters, repair itself using the internal sub-environment, and defend its internal parts from the surrounding environment. This paper presents the internal structure of a non-holonomic wheeled system that enables homeostasis via a fully connected interior, protected from the outside environment by a flexible membrane. The three objectives of this paper are to: 1) Explore the idea of nature creating higher-order life forms with wheeled limbs given the correct intermediate steps. 2) Characterize a robot that uses a homeostasis enabling wheel. 3) Determine the feasibility of using a homeostasis enabling wheel as a mode of locomotion.
A full scale atmospheric flight experimental research environment for the Mars helicopter
Sep 16, 2019
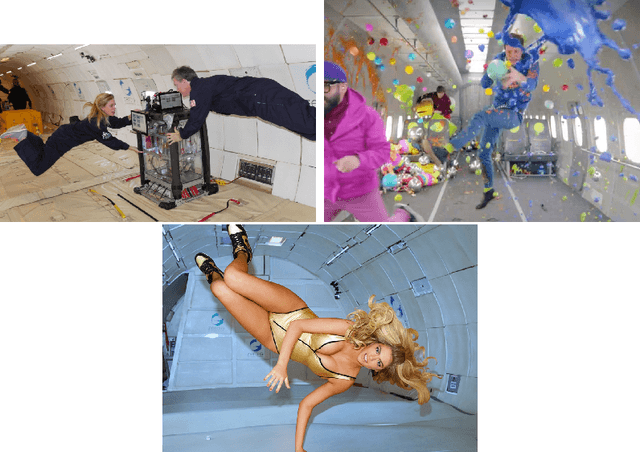


We propose to develop a full-accuracy flight test environment for the Mars helicopter and related Mars-atmospheric vehicles. The experiment would use reduced-g atmospheric flights with an aircraft that houses a properly sized vacuum chamber.
Towards a New Paradigm of UAV Safety
Mar 24, 2018
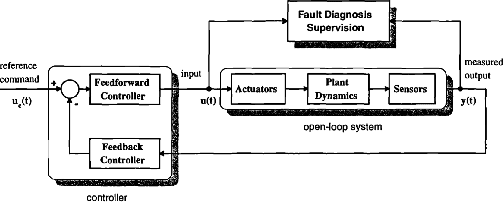
With the rising popularity of UAVs in the civilian world, we are currently witnessing and paradim shift in terms of operational safety of flying vehicles. Safe and ubiquitous human-system interaction shall remain the core requirement but those prescribed in general aviation are not adapted for UAVs. Yet we believe it is possible to leverage the specific aspects of unmanned aviation to meet acceptable safety requirements. We start this paper with by discussing the new operational context of civilian UAVs and investigate the meaning of safety in light of this new context. Next, we explore the different approaches to ensuring system safety from an avionics point of view. Subsets of operational requirements such as geofencing or mechanical systems for termination or impact limitation can easily be implemented. These are presented with the goal of limiting the collateral damages of a system failure. We then present some experimental results regarding two of the major problems with UAVs. With actual impacts, we demonstrate how dangerous uncontrolled crashes can be. Furthermore, with the large number of runaway drone experiences during civilian operations, the risk is even higher as they can travel a long way before crashing. We provide data on such a case where the software controller is working, keeping the UAV in the air, but the operator is unable to actually control the system. It should be terminated! Finally, after having analyzed the context and some actual solutions, based on a minimal set of requirement and our own experience, we are proposing a simple mechanical based safety system. It unequivocally terminates the flight in the most efficient way by instantly removing parts of the propellers leaving a minimal lifting surface. It takes advantage of what controllability may remain but with a deterministic ending: a definite landing.
Motion Rectification for an Homeostasis-Enabling Wheel
May 11, 2017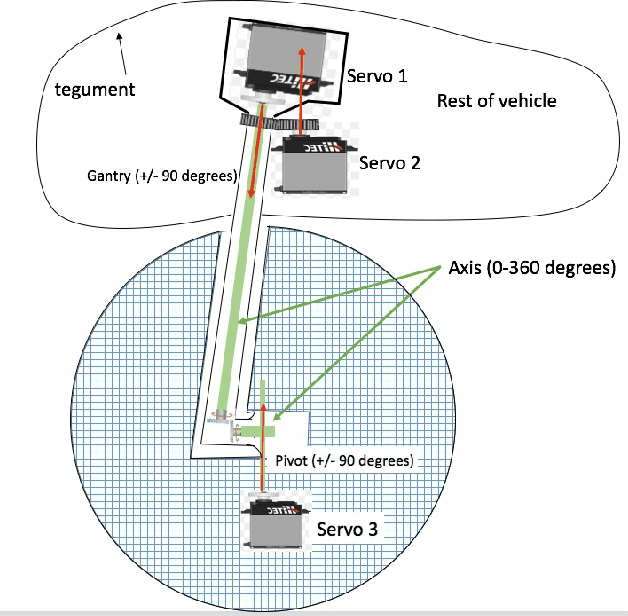
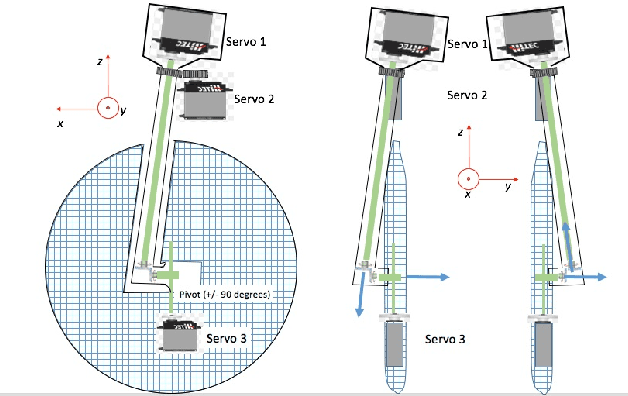
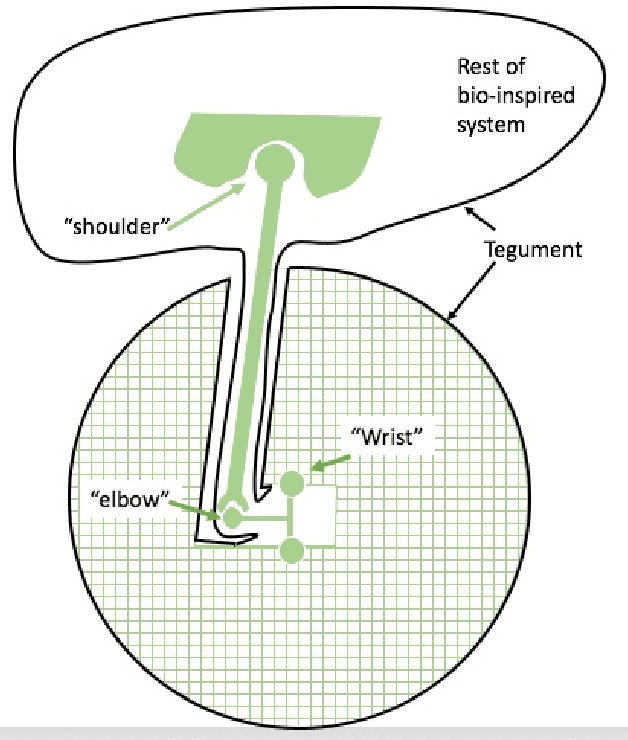
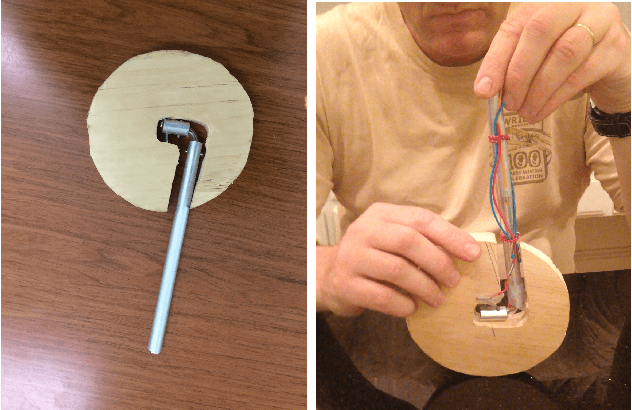
A wheel that is capable of producing thrust and maintaining vehicle internal integrity is presented. The wheel can be seen as an organic extension to the central unit (eg the vehicle) it is attached to, that is, the system and the wheel can be completely surrounded by the same tegument while enabling continuous wheel rotation without tearing the tegument. Furthermore, a skeleton linking the central unit of the system to the wheel's center can be made through the use of joints and linear links, while allowing the apparatus to rotate continuously in the same direction with bounded twisting and no tegument tear. For that reason, artificial muscles can also be used to actuate the entire system. The underlying enabling mechanism is the rectification of a small number of oscillatory inputs. Another contribution of the proposed setup is to offer a plausible, yet untested, evolutionary path from today's living animals towards animals capable of wheeled locomotion.