 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Design and Optimization of an Autonomous Microgravity Enabling Aerial Robot
Paper and Code
Nov 23, 2016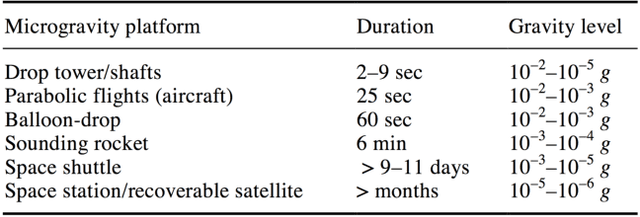

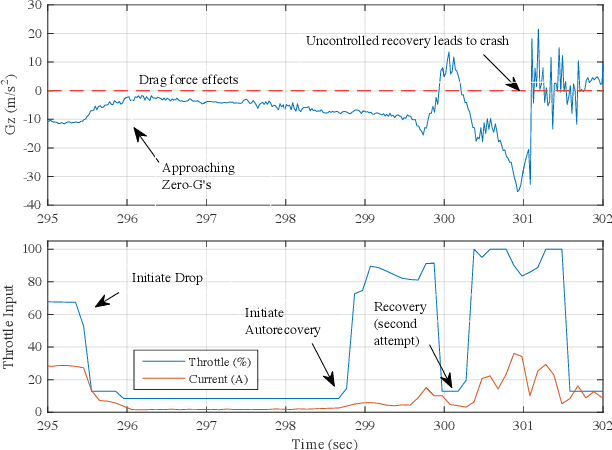
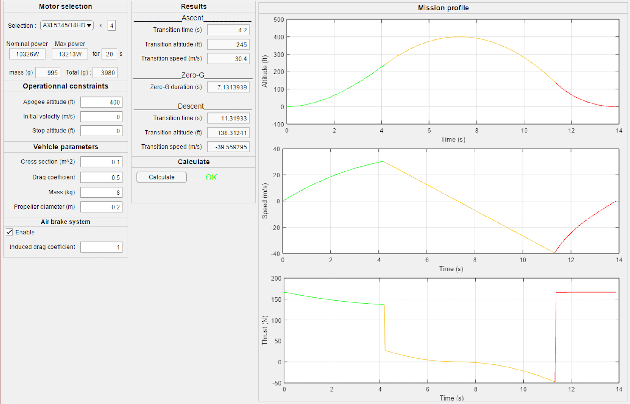
This paper describes the process and challenges behind the design and development of a micro-gravity enabling aerial robot. The vehicle, designed to provide at minimum 4 seconds of micro-gravity at an accuracy of .001 g's, is designed with suggestions and constraints from both academia and industry as well a regulatory agency. The feasibility of the flight mission is validated using a simulation environment, where models obtained from system identification of existing hardware are implemented to increase the fidelity of the simulation. The current development of a physical test bed is described. The vehicle employs both control and autonomy logic, which is developed in the Simulink environment and executed in a Pixhawk flight control board.