 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards a New Paradigm of UAV Safety
Mar 24, 2018
With the rising popularity of UAVs in the civilian world, we are currently witnessing and paradim shift in terms of operational safety of flying vehicles. Safe and ubiquitous human-system interaction shall remain the core requirement but those prescribed in general aviation are not adapted for UAVs. Yet we believe it is possible to leverage the specific aspects of unmanned aviation to meet acceptable safety requirements. We start this paper with by discussing the new operational context of civilian UAVs and investigate the meaning of safety in light of this new context. Next, we explore the different approaches to ensuring system safety from an avionics point of view. Subsets of operational requirements such as geofencing or mechanical systems for termination or impact limitation can easily be implemented. These are presented with the goal of limiting the collateral damages of a system failure. We then present some experimental results regarding two of the major problems with UAVs. With actual impacts, we demonstrate how dangerous uncontrolled crashes can be. Furthermore, with the large number of runaway drone experiences during civilian operations, the risk is even higher as they can travel a long way before crashing. We provide data on such a case where the software controller is working, keeping the UAV in the air, but the operator is unable to actually control the system. It should be terminated! Finally, after having analyzed the context and some actual solutions, based on a minimal set of requirement and our own experience, we are proposing a simple mechanical based safety system. It unequivocally terminates the flight in the most efficient way by instantly removing parts of the propellers leaving a minimal lifting surface. It takes advantage of what controllability may remain but with a deterministic ending: a definite landing.
Motion Rectification for an Homeostasis-Enabling Wheel
May 11, 2017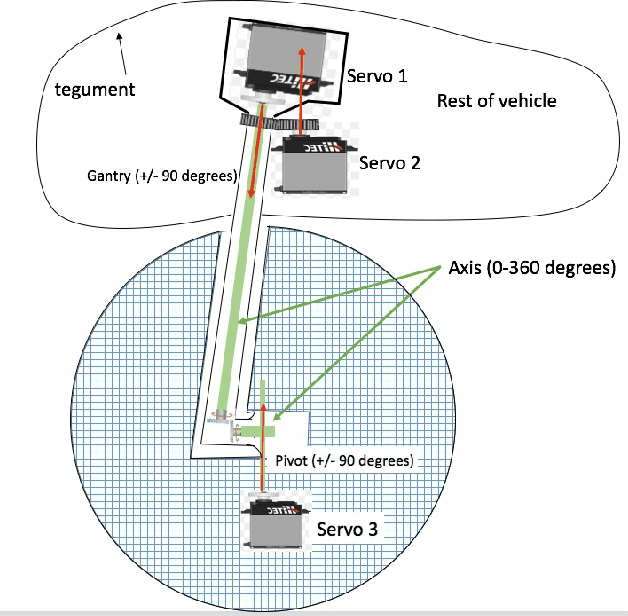
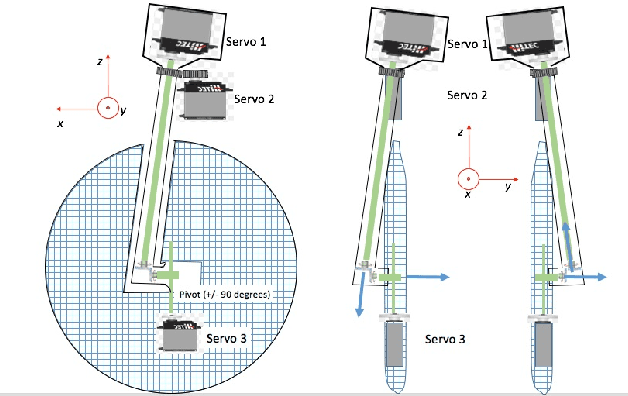
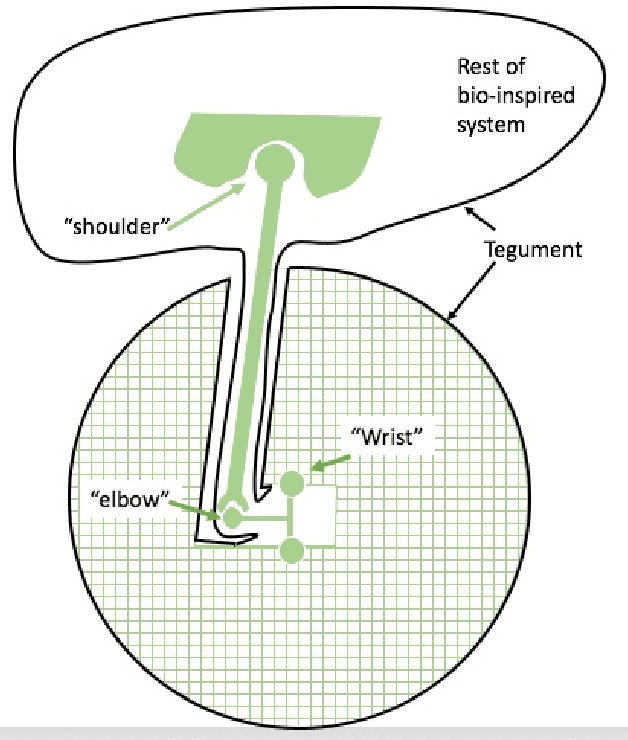
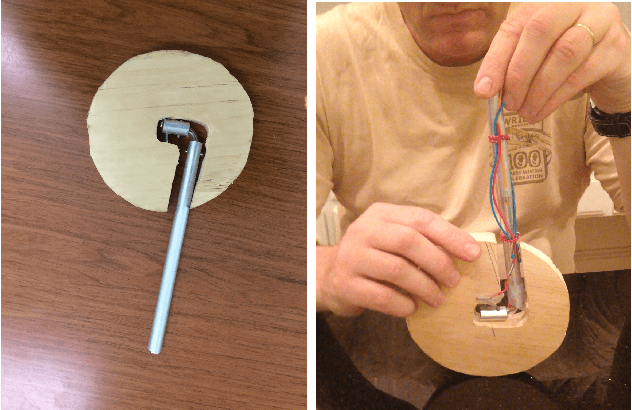
A wheel that is capable of producing thrust and maintaining vehicle internal integrity is presented. The wheel can be seen as an organic extension to the central unit (eg the vehicle) it is attached to, that is, the system and the wheel can be completely surrounded by the same tegument while enabling continuous wheel rotation without tearing the tegument. Furthermore, a skeleton linking the central unit of the system to the wheel's center can be made through the use of joints and linear links, while allowing the apparatus to rotate continuously in the same direction with bounded twisting and no tegument tear. For that reason, artificial muscles can also be used to actuate the entire system. The underlying enabling mechanism is the rectification of a small number of oscillatory inputs. Another contribution of the proposed setup is to offer a plausible, yet untested, evolutionary path from today's living animals towards animals capable of wheeled locomotion.
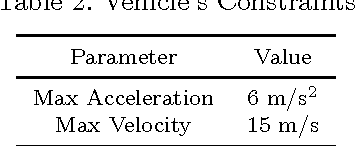
On the Design and Optimization of an Autonomous Microgravity Enabling Aerial Robot
Nov 23, 2016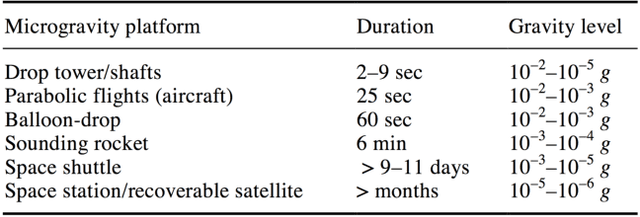

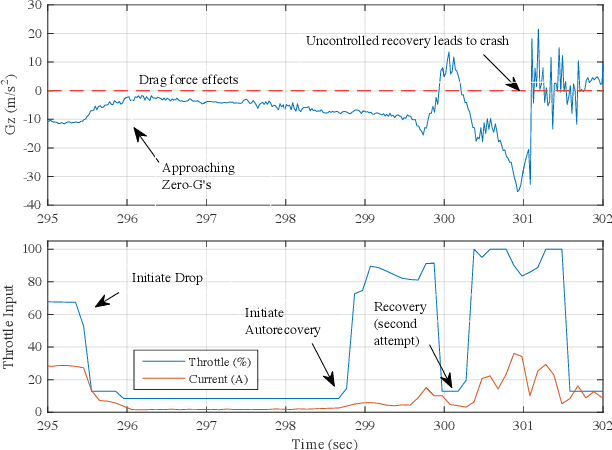
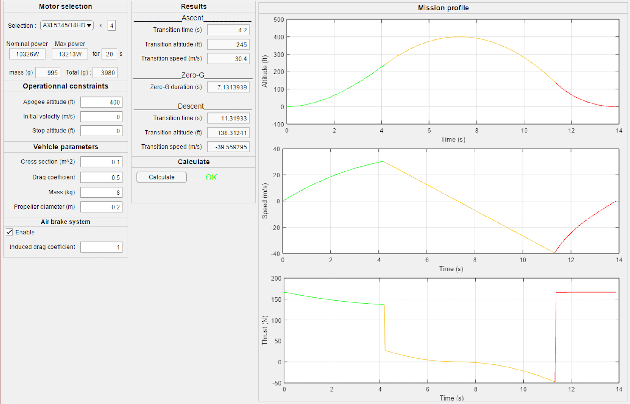
This paper describes the process and challenges behind the design and development of a micro-gravity enabling aerial robot. The vehicle, designed to provide at minimum 4 seconds of micro-gravity at an accuracy of .001 g's, is designed with suggestions and constraints from both academia and industry as well a regulatory agency. The feasibility of the flight mission is validated using a simulation environment, where models obtained from system identification of existing hardware are implemented to increase the fidelity of the simulation. The current development of a physical test bed is described. The vehicle employs both control and autonomy logic, which is developed in the Simulink environment and executed in a Pixhawk flight control board.
A Framework for Collision-Tolerant Optimal Trajectory Planning of Autonomous Vehicles
Nov 23, 2016

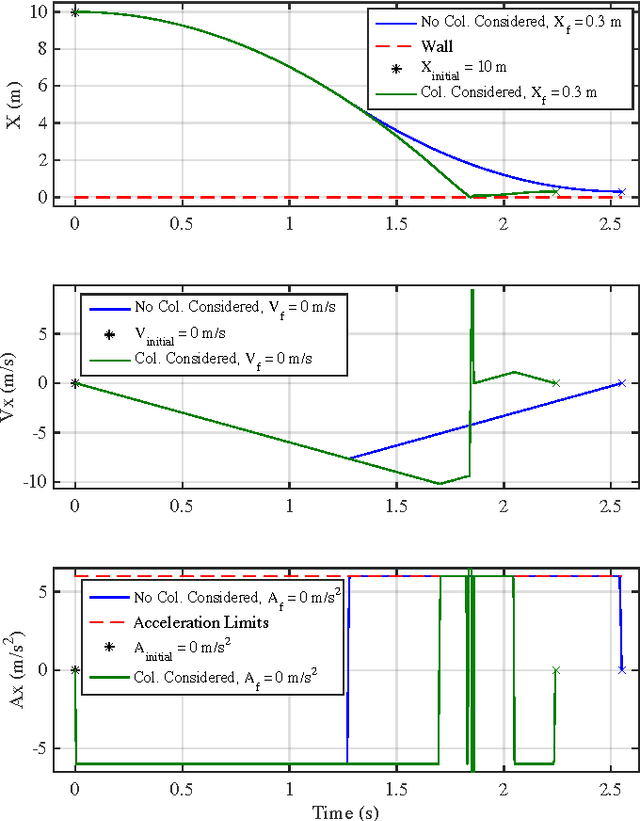
Collision-tolerant trajectory planning is the consideration that collisions, if they are planned appropriately, enable more effective path planning for robots capable of handling them. A mixed integer programming (MIP) optimization formulation demonstrates the computational practicality of optimizing trajectories that comprise planned collisions. A damage quantification function is proposed, and the influence of damage functions constraints on the trajectory are studied in simulation. Using a simple example, an increase in performance is achieved under this schema as compared to collision-free optimal trajectories.