 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling and Experimental Validation of the Mechanics of a Wheeled Non-Holonomic Robot Capable of Enabling Homeostasis
Sep 25, 2019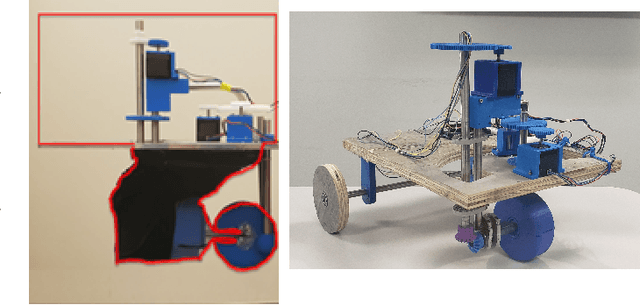
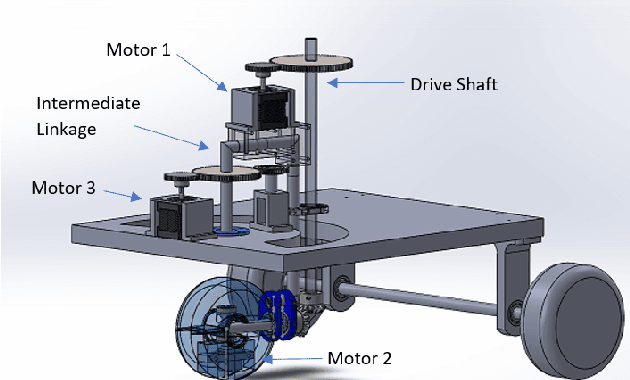
The field of bio-inspired robotics seeks to create mechanical systems that mimic the designs and concepts used by biological systems. One of the more challenging biological concepts to imitate in mechanical systems is the ability to create an internal environment that can foster homeostasis through the use of a membrane similar to skin. A robot with this ability would be able to regulate internal parameters, repair itself using the internal sub-environment, and defend its internal parts from the surrounding environment. This paper presents the internal structure of a non-holonomic wheeled system that enables homeostasis via a fully connected interior, protected from the outside environment by a flexible membrane. The three objectives of this paper are to: 1) Explore the idea of nature creating higher-order life forms with wheeled limbs given the correct intermediate steps. 2) Characterize a robot that uses a homeostasis enabling wheel. 3) Determine the feasibility of using a homeostasis enabling wheel as a mode of locomotion.
Motion Rectification for an Homeostasis-Enabling Wheel
May 11, 2017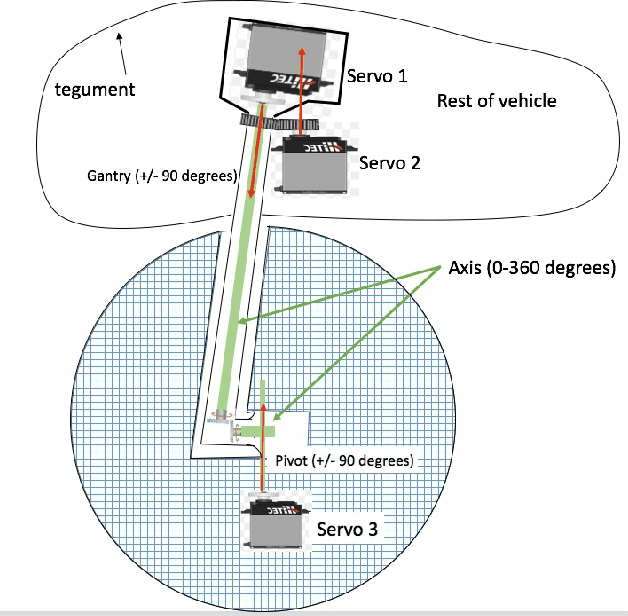
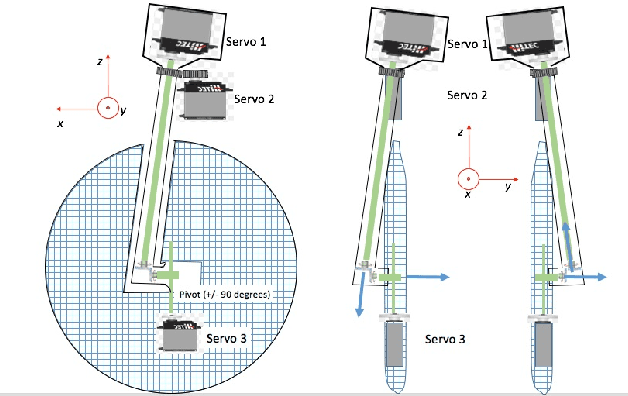
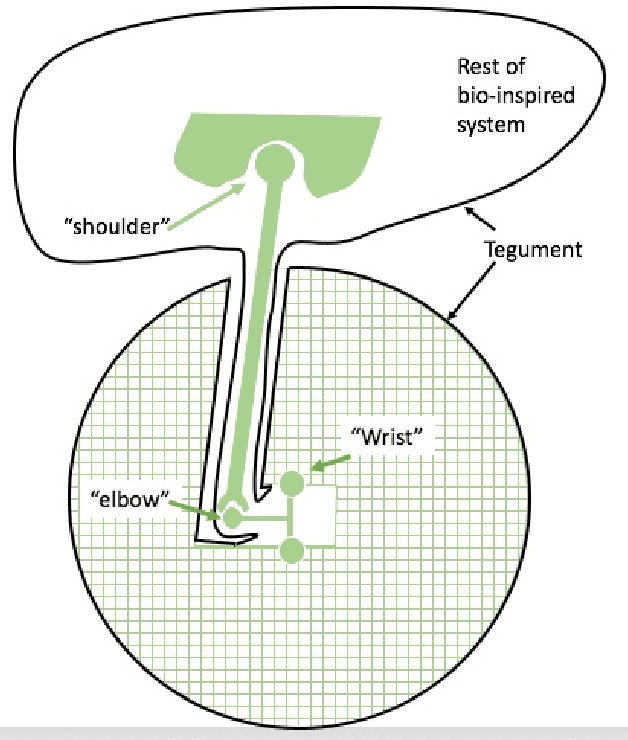
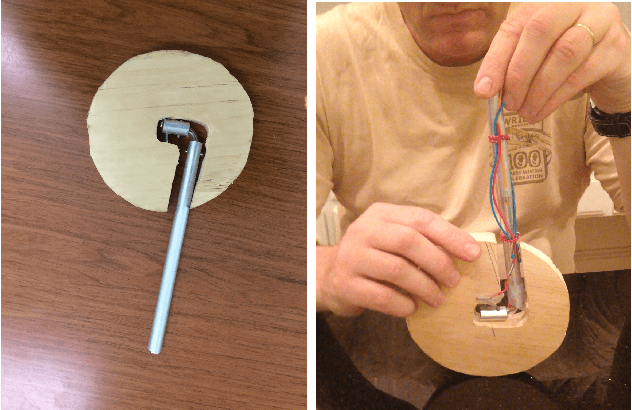
A wheel that is capable of producing thrust and maintaining vehicle internal integrity is presented. The wheel can be seen as an organic extension to the central unit (eg the vehicle) it is attached to, that is, the system and the wheel can be completely surrounded by the same tegument while enabling continuous wheel rotation without tearing the tegument. Furthermore, a skeleton linking the central unit of the system to the wheel's center can be made through the use of joints and linear links, while allowing the apparatus to rotate continuously in the same direction with bounded twisting and no tegument tear. For that reason, artificial muscles can also be used to actuate the entire system. The underlying enabling mechanism is the rectification of a small number of oscillatory inputs. Another contribution of the proposed setup is to offer a plausible, yet untested, evolutionary path from today's living animals towards animals capable of wheeled locomotion.
The Robotarium: A remotely accessible swarm robotics research testbed
Sep 15, 2016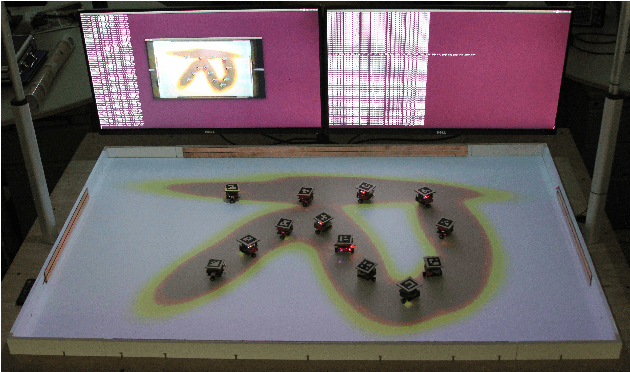
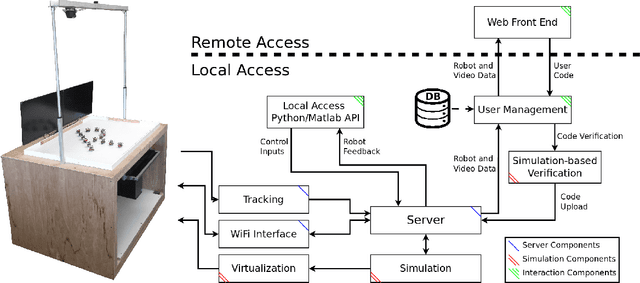
This paper describes the Robotarium -- a remotely accessible, multi-robot research facility. The impetus behind the Robotarium is that multi-robot testbeds constitute an integral and essential part of the multi-robot research cycle, yet they are expensive, complex, and time-consuming to develop, operate, and maintain. These resource constraints, in turn, limit access for large groups of researchers and students, which is what the Robotarium is remedying by providing users with remote access to a state-of-the-art multi-robot test facility. This paper details the design and operation of the Robotarium and discusses the considerations one must take when making complex hardware remotely accessible. In particular, safety must be built into the system already at the design phase without overly constraining what coordinated control programs users can upload and execute, which calls for minimally invasive safety routines with provable performance guarantees.
Safe, Remote-Access Swarm Robotics Research on the Robotarium
Apr 03, 2016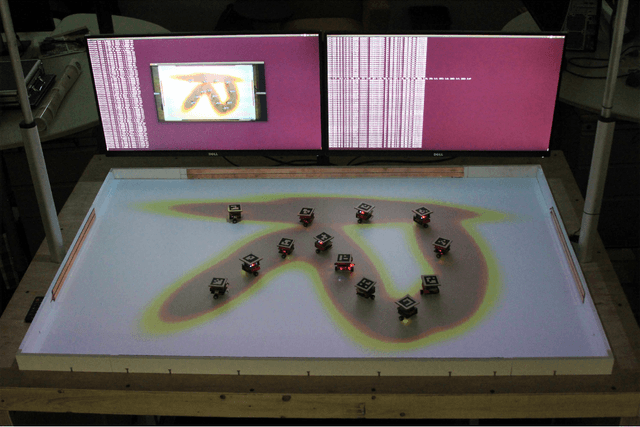
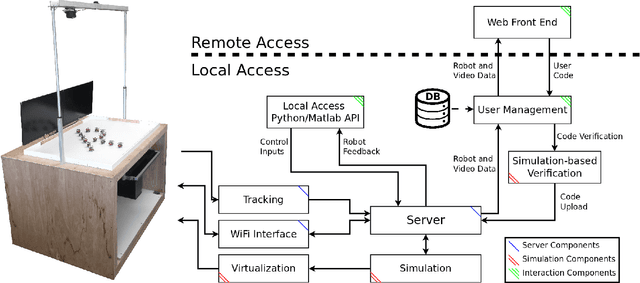
This paper describes the development of the Robotarium -- a remotely accessible, multi-robot research facility. The impetus behind the Robotarium is that multi-robot testbeds constitute an integral and essential part of the multi-agent research cycle, yet they are expensive, complex, and time-consuming to develop, operate, and maintain. These resource constraints, in turn, limit access for large groups of researchers and students, which is what the Robotarium is remedying by providing users with remote access to a state-of-the-art multi-robot test facility. This paper details the design and operation of the Robotarium as well as connects these to the particular considerations one must take when making complex hardware remotely accessible. In particular, safety must be built in already at the design phase without overly constraining which coordinated control programs the users can upload and execute, which calls for minimally invasive safety routines with provable performance guarantees.