 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Dodecacopter: a Versatile Multirotor System of Dodecahedron-Shaped Modules
Apr 23, 2025



With the promise of greater safety and adaptability, modular reconfigurable uncrewed air vehicles have been proposed as unique, versatile platforms holding the potential to replace multiple types of monolithic vehicles at once. State-of-the-art rigidly assembled modular vehicles are generally two-dimensional configurations in which the rotors are coplanar and assume the shape of a "flight array". We introduce the Dodecacopter, a new type of modular rotorcraft where all modules take the shape of a regular dodecahedron, allowing the creation of richer sets of configurations beyond flight arrays. In particular, we show how the chosen module design can be used to create three-dimensional and fully actuated configurations. We justify the relevance of these types of configurations in terms of their structural and actuation properties with various performance indicators. Given the broad range of configurations and capabilities that can be achieved with our proposed design, we formulate tractable optimization programs to find optimal configurations given structural and actuation constraints. Finally, a prototype of such a vehicle is presented along with results of performed flights in multiple configurations.
Modeling and Experimental Validation of a Fractal Tetrahedron UAS Assembly
Mar 16, 2020

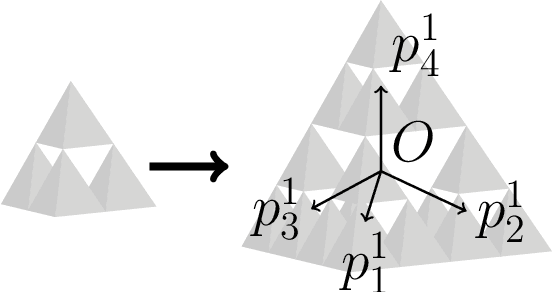

This paper presents the foundation of a modular robotic system comprised of several novel modules in the shape of a tetrahedron. Four single-propeller submodules are assembled to create the Tetracopter, a tetrahedron-shaped quad-rotorcraft used as the elementary module of a modular flying system. This modular flying system is built by assembling the different elementary modules in a fractal shape. The fractal tetrahedron structure of the modular flying assembly grants the vehicle more rigidity than a conventional two-dimensional modular robotic flight system while maintaining the relative efficiency of a two-dimensional modular robotic flight system. A prototype of the Tetracopter has been modeled, fabricated, and successfully flight-tested by the Decision and Control Laboratory at the Georgia Institute of Technology. The results of this research set the foundation for the development of Tetrahedron rotorcraft that can maintain controllable flight and assemble in flight to create a Fractal Tetrahedron Assembly.
Modeling and Experimental Validation of the Mechanics of a Wheeled Non-Holonomic Robot Capable of Enabling Homeostasis
Sep 25, 2019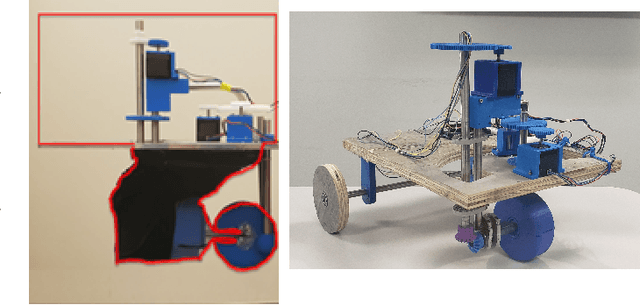
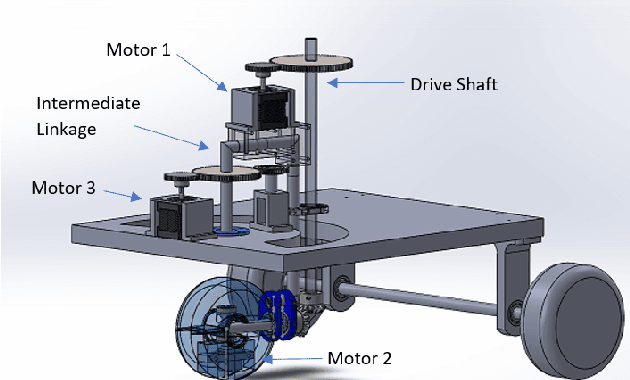
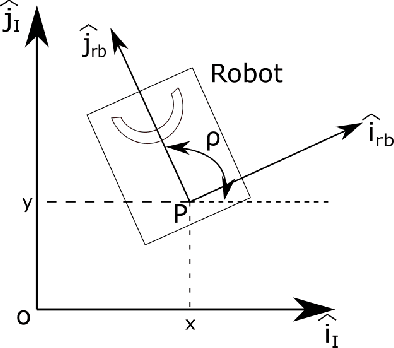
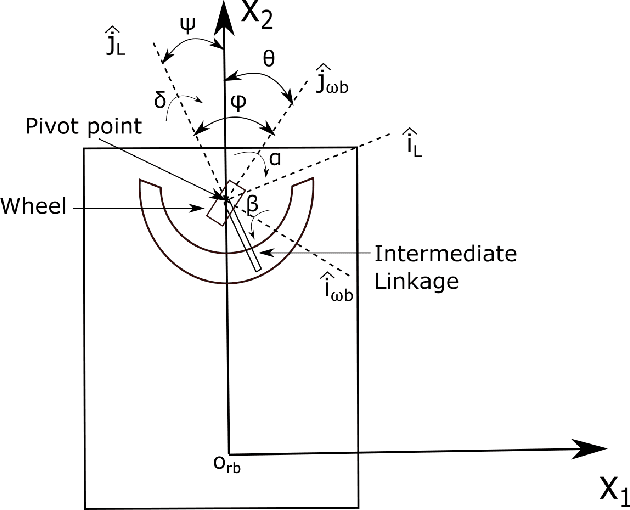
The field of bio-inspired robotics seeks to create mechanical systems that mimic the designs and concepts used by biological systems. One of the more challenging biological concepts to imitate in mechanical systems is the ability to create an internal environment that can foster homeostasis through the use of a membrane similar to skin. A robot with this ability would be able to regulate internal parameters, repair itself using the internal sub-environment, and defend its internal parts from the surrounding environment. This paper presents the internal structure of a non-holonomic wheeled system that enables homeostasis via a fully connected interior, protected from the outside environment by a flexible membrane. The three objectives of this paper are to: 1) Explore the idea of nature creating higher-order life forms with wheeled limbs given the correct intermediate steps. 2) Characterize a robot that uses a homeostasis enabling wheel. 3) Determine the feasibility of using a homeostasis enabling wheel as a mode of locomotion.