 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling and Experimental Validation of a Fractal Tetrahedron UAS Assembly
Paper and Code
Mar 16, 2020

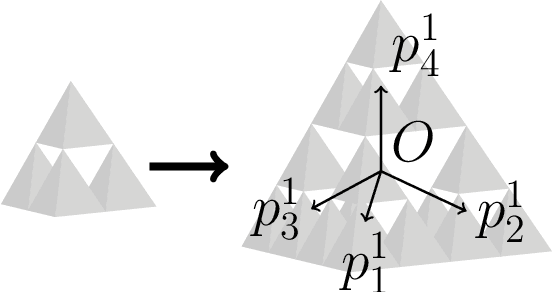

This paper presents the foundation of a modular robotic system comprised of several novel modules in the shape of a tetrahedron. Four single-propeller submodules are assembled to create the Tetracopter, a tetrahedron-shaped quad-rotorcraft used as the elementary module of a modular flying system. This modular flying system is built by assembling the different elementary modules in a fractal shape. The fractal tetrahedron structure of the modular flying assembly grants the vehicle more rigidity than a conventional two-dimensional modular robotic flight system while maintaining the relative efficiency of a two-dimensional modular robotic flight system. A prototype of the Tetracopter has been modeled, fabricated, and successfully flight-tested by the Decision and Control Laboratory at the Georgia Institute of Technology. The results of this research set the foundation for the development of Tetrahedron rotorcraft that can maintain controllable flight and assemble in flight to create a Fractal Tetrahedron Assembly.