 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Dodecacopter: a Versatile Multirotor System of Dodecahedron-Shaped Modules
Apr 23, 2025



With the promise of greater safety and adaptability, modular reconfigurable uncrewed air vehicles have been proposed as unique, versatile platforms holding the potential to replace multiple types of monolithic vehicles at once. State-of-the-art rigidly assembled modular vehicles are generally two-dimensional configurations in which the rotors are coplanar and assume the shape of a "flight array". We introduce the Dodecacopter, a new type of modular rotorcraft where all modules take the shape of a regular dodecahedron, allowing the creation of richer sets of configurations beyond flight arrays. In particular, we show how the chosen module design can be used to create three-dimensional and fully actuated configurations. We justify the relevance of these types of configurations in terms of their structural and actuation properties with various performance indicators. Given the broad range of configurations and capabilities that can be achieved with our proposed design, we formulate tractable optimization programs to find optimal configurations given structural and actuation constraints. Finally, a prototype of such a vehicle is presented along with results of performed flights in multiple configurations.
Symmetry-enforcing neural networks with applications to constitutive modeling
Dec 21, 2023The use of machine learning techniques to homogenize the effective behavior of arbitrary microstructures has been shown to be not only efficient but also accurate. In a recent work, we demonstrated how to combine state-of-the-art micromechanical modeling and advanced machine learning techniques to homogenize complex microstructures exhibiting non-linear and history dependent behaviors. The resulting homogenized model, termed smart constitutive law (SCL), enables the adoption of microstructurally informed constitutive laws into finite element solvers at a fraction of the computational cost required by traditional concurrent multiscale approaches. In this work, the capabilities of SCLs are expanded via the introduction of a novel methodology that enforces material symmetries at the neuron level, applicable across various neural network architectures. This approach utilizes tensor-based features in neural networks, facilitating the concise and accurate representation of symmetry-preserving operations, and is general enough to be extend to problems beyond constitutive modeling. Details on the construction of these tensor-based neural networks and their application in learning constitutive laws are presented for both elastic and inelastic materials. The superiority of this approach over traditional neural networks is demonstrated in scenarios with limited data and strong symmetries, through comprehensive testing on various materials, including isotropic neo-Hookean materials and tensegrity lattice metamaterials. This work is concluded by a discussion on the potential of this methodology to discover symmetry bases in materials and by an outline of future research directions.
Soft Tensegrity Systems for Planetary Landing and Exploration
Mar 24, 2020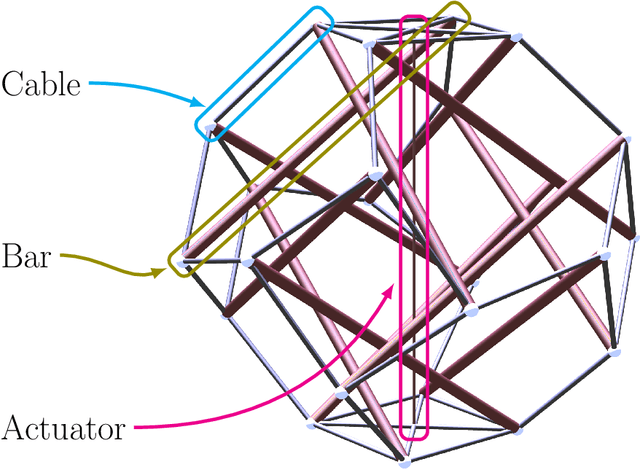



During the last decade, tensegrity systems have been the focus of numerous investigations exploring the possibility of adopting them for planetary landing and exploration applications. Early approaches mainly focused on locomotion aspects related to tensegrity systems, where mobility was achieved by actuating the cable members of the system. Later efforts focused on understanding energy storage mechanisms of tensegrity systems undergoing landing events. More precisely, it was shown that under highly dynamic events, buckling of individual members of a tensegrity structure does not necessarily imply structural failure, suggesting that efficient structural design of planetary landers could be achieved by allowing its compression members to buckle. In this work, we combine both aspects of previous research on tensegrity structures, showing a possible lattice-like structural configuration able to withstand impact events, store pre-impact kinetic energy, and utilize a part of that energy for the locomotion process. Our work shows the feasibility of this proposed approach via both experimental and computational means.
Modeling and Experimental Validation of a Fractal Tetrahedron UAS Assembly
Mar 16, 2020

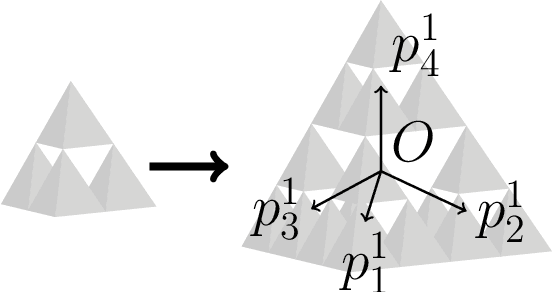

This paper presents the foundation of a modular robotic system comprised of several novel modules in the shape of a tetrahedron. Four single-propeller submodules are assembled to create the Tetracopter, a tetrahedron-shaped quad-rotorcraft used as the elementary module of a modular flying system. This modular flying system is built by assembling the different elementary modules in a fractal shape. The fractal tetrahedron structure of the modular flying assembly grants the vehicle more rigidity than a conventional two-dimensional modular robotic flight system while maintaining the relative efficiency of a two-dimensional modular robotic flight system. A prototype of the Tetracopter has been modeled, fabricated, and successfully flight-tested by the Decision and Control Laboratory at the Georgia Institute of Technology. The results of this research set the foundation for the development of Tetrahedron rotorcraft that can maintain controllable flight and assemble in flight to create a Fractal Tetrahedron Assembly.