Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Framework for Collision-Tolerant Optimal Trajectory Planning of Autonomous Vehicles
Paper and Code
Nov 23, 2016

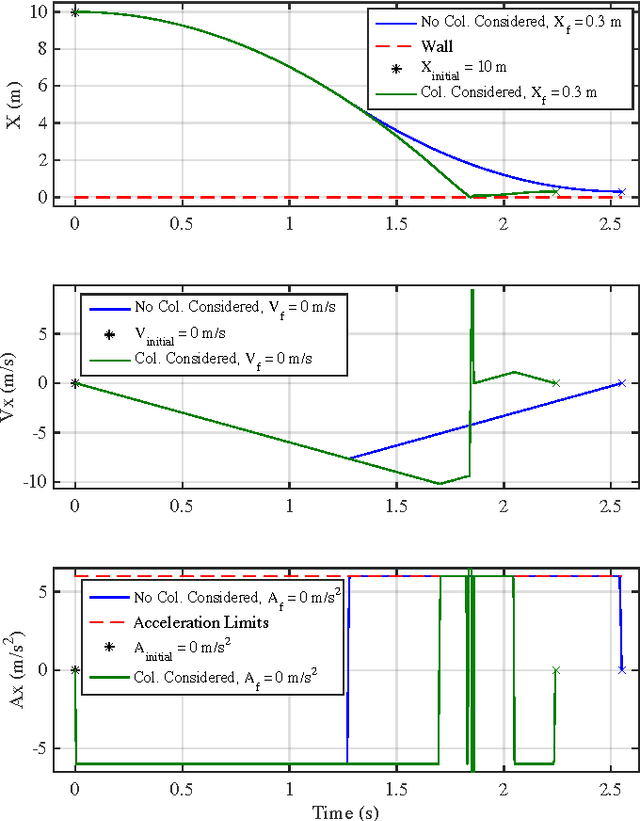
Collision-tolerant trajectory planning is the consideration that collisions, if they are planned appropriately, enable more effective path planning for robots capable of handling them. A mixed integer programming (MIP) optimization formulation demonstrates the computational practicality of optimizing trajectories that comprise planned collisions. A damage quantification function is proposed, and the influence of damage functions constraints on the trajectory are studied in simulation. Using a simple example, an increase in performance is achieved under this schema as compared to collision-free optimal trajectories.
* 6 pages, 5 figures
View paper on