 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscrete and Continuous ambush games: optimal policies and approximate solutions
Dec 07, 2016
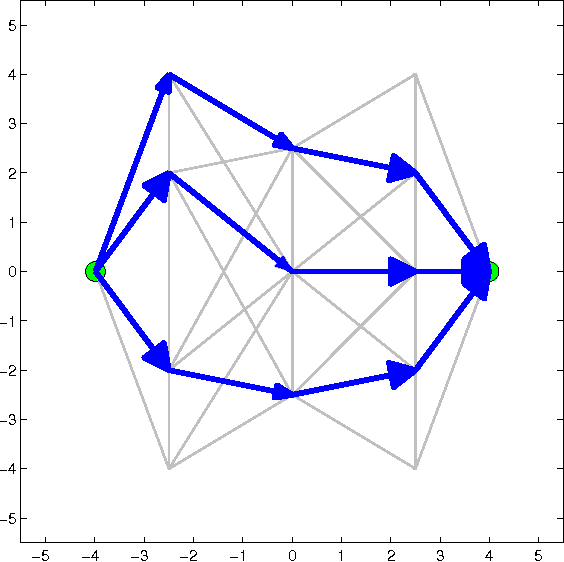

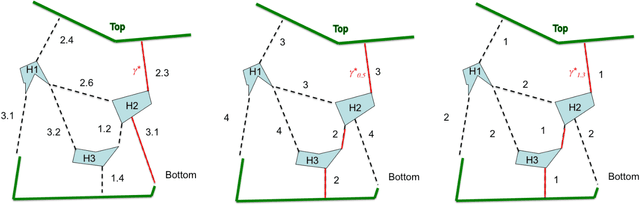
We consider an autonomous navigation problem, whereby a traveler aims at traversing an environment in which an adversary tries to set an ambush. A two players zero sum game is introduced. Players' strategies are computed as random path distributions, a realization of which is the path chosen by the traveler. A parallel is drawn between the discrete problem, where the traveler moves on a network, and the continuous problem, where the traveler moves in the plane. Analytical optimal policies are derived. Using assumptions from the Minimal Cut - Maximal Flow literature, the optimal value of the game is shown to be related to the maximum flow on the environment in both the discrete and the continuous cases, when the reward function for the ambusher is uniform. A linear program is introduced that allows for the computation of optimal policies, compatible with non-uniform reward functions. In order to relax the assumptions for the computation of the players' optimal strategies of the continuous game, a network is created, inspired by recently introduced sampling based motion planning techniques, and the linear program is adapted for continuous constraints.
A Complete framework for ambush avoidance in realistic environments
Aug 26, 2014



Operating vehicles in adversarial environments between a recurring origin-destination pair requires new planning techniques. A two players zero-sum game is introduced. The goal of the first player is to minimize the expected casualties undergone by a convoy. The goal of the second player is to maximize this damage. The outcome of the game is obtained via a linear program that solves the corresponding minmax optimization problem over this outcome. Different environment models are defined in order to compute routing strategies over unstructured environments. To compare these methods for increasingly accurate representations of the environment, a grid-based model is chosen to represent the environment and the existence of a sufficient network size is highlighted. A global framework for the generation of realistic routing strategies between any two points is described. This framework requires a good assessment of the potential casualties at any location, therefore the most important parameters are identified. Finally the framework is tested on real world environments.
Planning Random path distributions for ambush games in unstructured environments
Aug 28, 2012



Operating vehicles in adversarial environments require non-conventional planning techniques. A two-player, zero-sum non-cooperative game is introduced, which is solved via a linear program. An extension is proposed to construct networks displaying good representations of the environment characteristics, while offering acceptable results for the technique used. Sensitivity of the solution to the LP solver algorithm is identified. The performances of the planner are finally assessed by comparison with those of conventional planners. Results are used to formulate secondary objectives to the problem.