 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAirspace-aware Contingency Landing Planning
Feb 06, 2026This paper develops a real-time, search-based aircraft contingency landing planner that minimizes traffic disruptions while accounting for ground risk. The airspace model captures dense air traffic departure and arrival flows, helicopter corridors, and prohibited zones and is demonstrated with a Washington, D.C., area case study. Historical Automatic Dependent Surveillance-Broadcast (ADS-B) data are processed to estimate air traffic density. A low-latency computational geometry algorithm generates proximity-based heatmaps around high-risk corridors and restricted regions. Airspace risk is quantified as the cumulative exposure time of a landing trajectory within congested regions, while ground risk is assessed from overflown population density to jointly guide trajectory selection. A landing site selection module further mitigates disruption to nominal air traffic operations. Benchmarking against minimum-risk Dubins solutions demonstrates that the proposed planner achieves lower joint risk and reduced airspace disruption while maintaining real-time performance. Under airspace-risk-only conditions, the planner generates trajectories within an average of 2.9 seconds on a laptop computer. Future work will incorporate dynamic air traffic updates to enable spatiotemporal contingency landing planning that minimizes the need for real-time traffic rerouting.
Fast and Noise-Resilient Magnetic Field Mapping on a Low-Cost UAV Using Gaussian Process Regression
Jan 31, 2023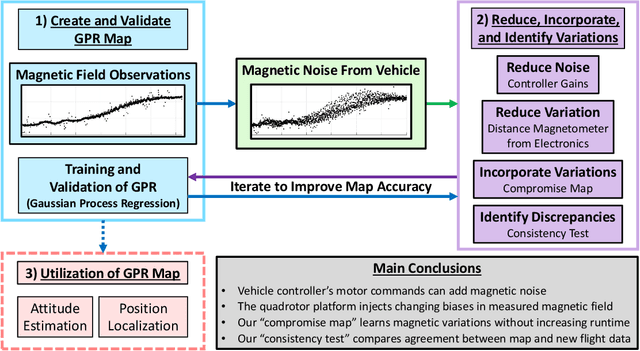

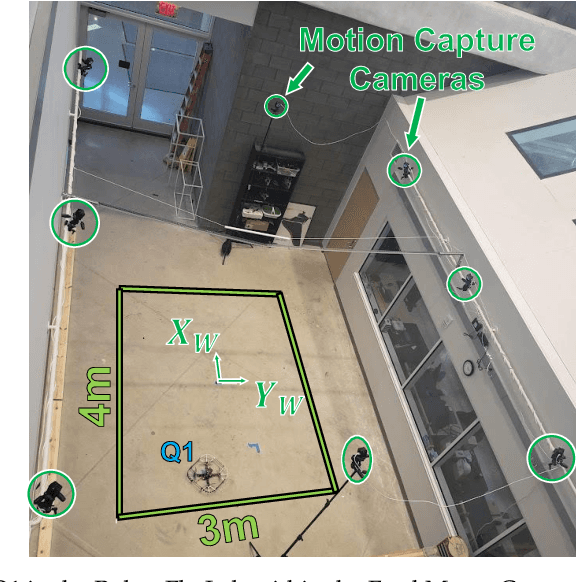

This work presents a number of techniques to improve the ability to create magnetic field maps on a UAV which can be used to quickly and reliably gather magnetic field observations at multiple altitudes in a workspace. Unfortunately, the electronics on the UAV can introduce their own magnetic fields, distorting the resultant magnetic field map. We show methods of reducing and working with UAV-induced noise to better enable magnetic fields as a sensing modality for indoor navigation. First, some gains in our flight controller create high-frequency motor commands that introduce large noise in the measured magnetic field. Next, we implement a common noise reduction method of distancing the magnetometer from other components on our UAV. Finally, we introduce what we call a compromise GPR (Gaussian process regression) map that can be trained on multiple flight tests to learn any flight-by-flight variations between UAV observation tests. We investigate the spatial density of observations used to train a GPR map then use the compromise map to define a consistency test that can indicate whether or not the magnetometer data and corresponding GPR map are appropriate to use for state estimation. The interventions we introduce in this work facilitate indoor position localization of a UAV whose estimates we found to be quite sensitive to noise generated by the UAV.
Urban Metric Maps for Small Unmanned Aircraft Systems Motion Planning
Feb 14, 2021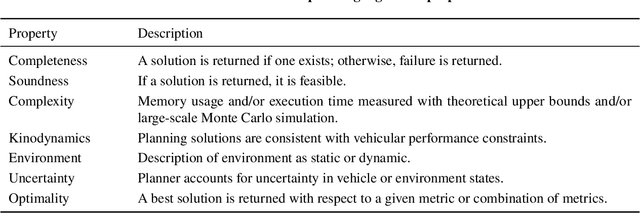
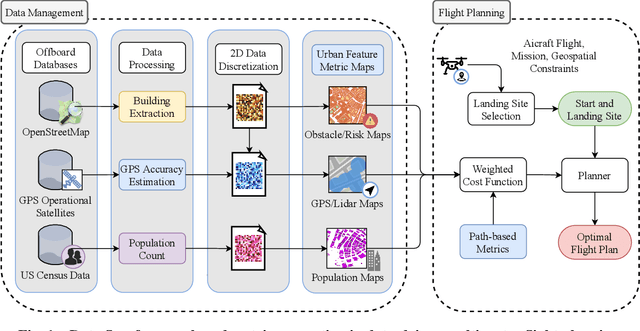
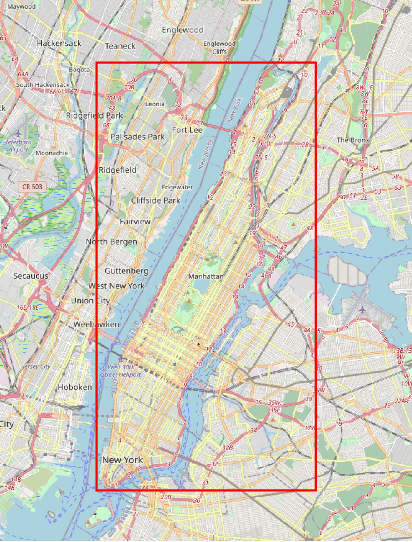
Low-altitude urban flight planning for small Unmanned Aircraft Systems (UAS) requires accurate vehicle, environment maps, and risk models to assure flight plans consider the urban landscape as well as airspace constraints. This paper presents a suite of motion planning metrics designed for small UAS urban flight. We define map-based and path-based metrics to holistically characterize motion plan quality. Proposed metrics are examined in the context of representative geometric, graph-based, and sampling-based motion planners applied to a multicopter small UAS. A novel multi-objective heuristic is proposed and applied for graph-based and sampling motion planners at four urban UAS flight altitude layers. Monte Carlo case studies in a New York City urban environment illustrate metric map properties and planner performance. Motion plans are evaluated as a function of planning algorithm, location, range, and flight altitude.
Egocentric Vision-based Future Vehicle Localization for Intelligent Driving Assistance Systems
Mar 03, 2019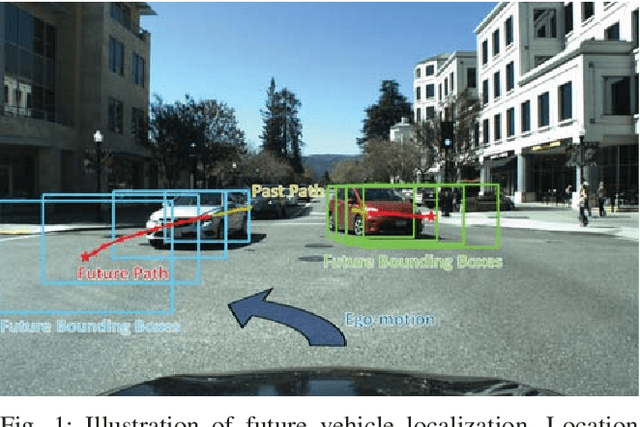
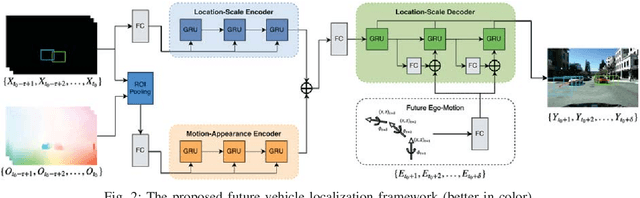
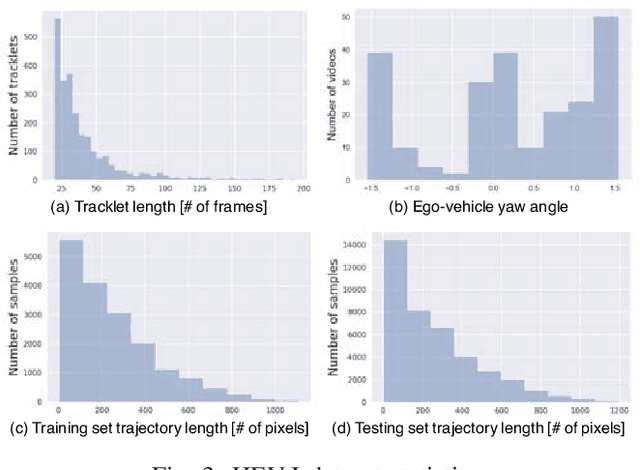
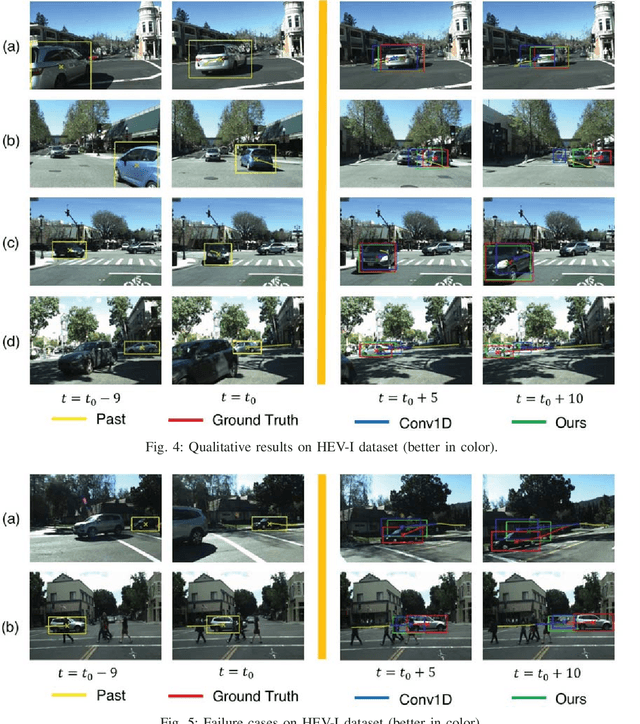
Predicting the future location of vehicles is essential for safety-critical applications such as advanced driver assistance systems (ADAS) and autonomous driving. This paper introduces a novel approach to simultaneously predict both the location and scale of target vehicles in the first-person (egocentric) view of an ego-vehicle. We present a multi-stream recurrent neural network (RNN) encoder-decoder model that separately captures both object location and scale and pixel-level observations for future vehicle localization. We show that incorporating dense optical flow improves prediction results significantly since it captures information about motion as well as appearance change. We also find that explicitly modeling future motion of the ego-vehicle improves the prediction accuracy, which could be especially beneficial in intelligent and automated vehicles that have motion planning capability. To evaluate the performance of our approach, we present a new dataset of first-person videos collected from a variety of scenarios at road intersections, which are particularly challenging moments for prediction because vehicle trajectories are diverse and dynamic.
Unsupervised Traffic Accident Detection in First-Person Videos
Mar 02, 2019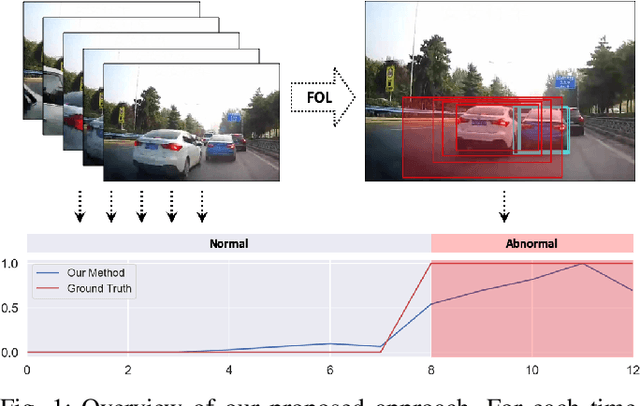
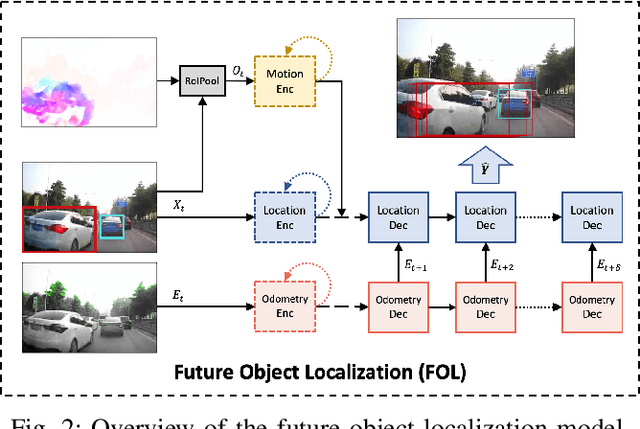
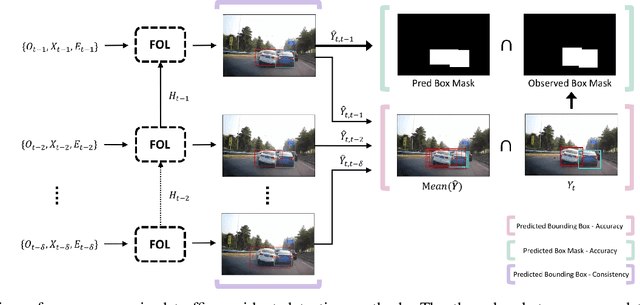
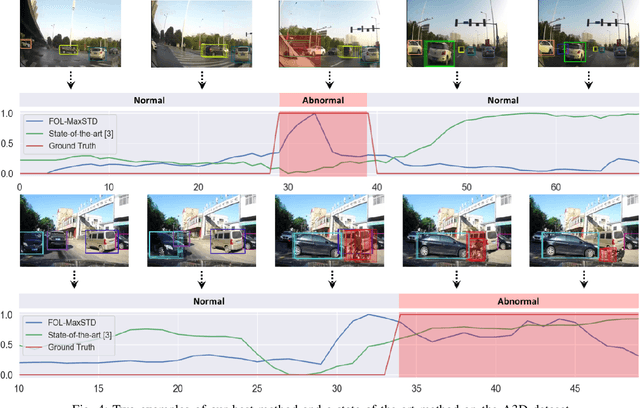
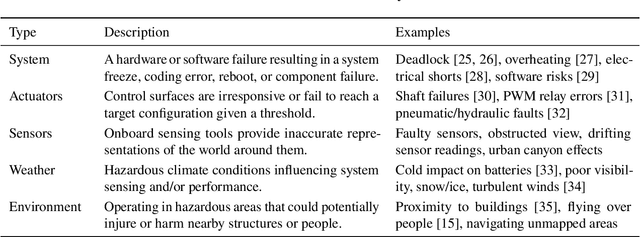
Recognizing abnormal events such as traffic violations and accidents in natural driving scenes is essential for successful autonomous and advanced driver assistance systems. However, most work on video anomaly detection suffers from one of two crucial drawbacks. First, it assumes cameras are fixed and videos have a static background, which is reasonable for surveillance applications but not for vehicle-mounted cameras. Second, it poses the problem as one-class classification, which relies on arduous human annotation and only recognizes categories of anomalies that have been explicitly trained. In this paper, we propose an unsupervised approach for traffic accident detection in first-person videos. Our major novelty is to detect anomalies by predicting the future locations of traffic participants and then monitoring the prediction accuracy and consistency metrics with three different strategies. To evaluate our approach, we introduce a new dataset of diverse traffic accidents, AnAn Accident Detection (A3D), as well as another publicly-available dataset. Experimental results show that our approach outperforms the state-of-the-art.
A Data-Driven Approach for Autonomous Motion Planning and Control in Off-Road Driving Scenarios
May 25, 2018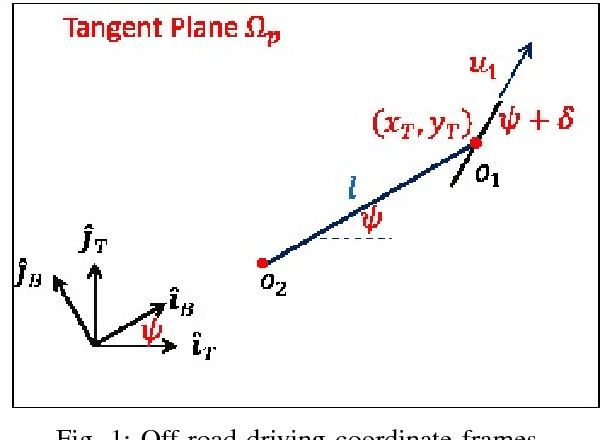
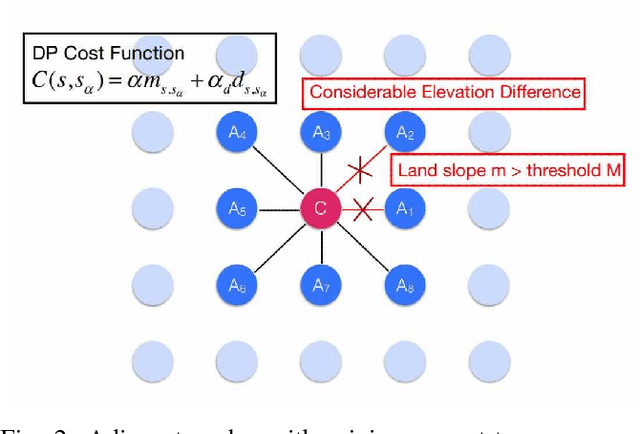
This paper presents a novel data-driven approach to vehicle motion planning and control in off-road driving scenarios. For autonomous off-road driving, environmental conditions impact terrain traversability as a function of weather, surface composition, and slope. Geographical information system (GIS) and National Centers for Environmental Information datasets are processed to provide this information for interactive planning and control system elements. A top-level global route planner (GRP) defines optimal waypoints using dynamic programming (DP). A local path planner (LPP) computes a desired trajectory between waypoints such that infeasible control states and collisions with obstacles are avoided. The LPP also updates the GRP with real-time sensing and control data. A low-level feedback controller applies feedback linearization to asymptotically track the specified LPP trajectory. Autonomous driving simulation results are presented for traversal of terrains in Oregon and Indiana case studies.
Automatic Classification of Roof Shapes for Multicopter Emergency Landing Site Selection
Feb 17, 2018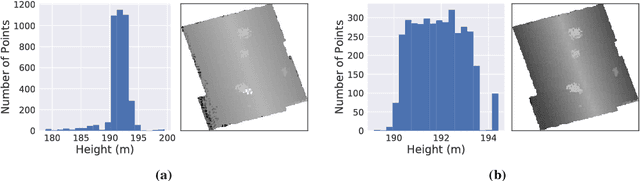
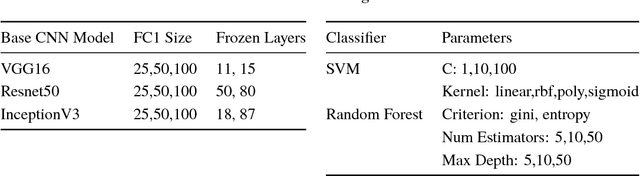

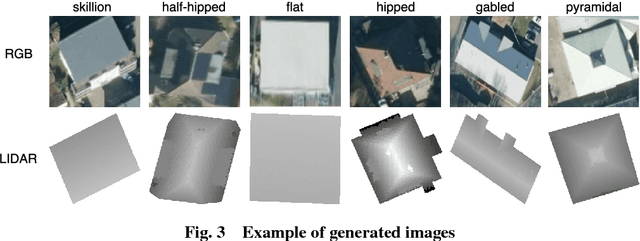
Geographic information systems (GIS) now provide accurate maps of terrain, roads, waterways, and building footprints and heights. Aircraft, particularly small unmanned aircraft systems, can exploit additional information such as building roof structure to improve navigation accuracy and safety particularly in urban regions. This paper proposes a method to automatically label building roof shape types. Satellite imagery and LIDAR data from Witten, Germany are fed to convolutional neural networks (CNN) to extract salient feature vectors. Supervised training sets are automatically generated from pre-labeled buildings contained in the OpenStreetMap database. Multiple CNN architectures are trained and tested, with the best performing networks providing a condensed feature set for support vector machine and decision tree classifiers. Satellite and LIDAR data fusion is shown to provide greater classification accuracy than through use of either data type individually.
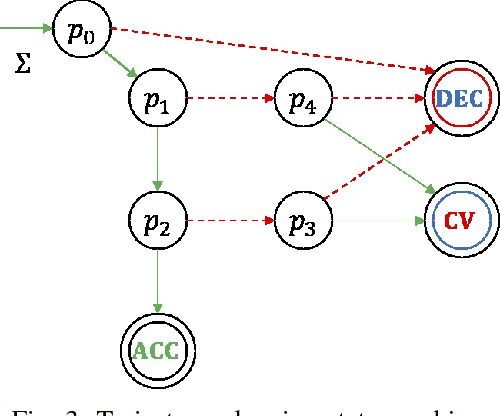
Plan Development using Local Probabilistic Models
Feb 13, 2013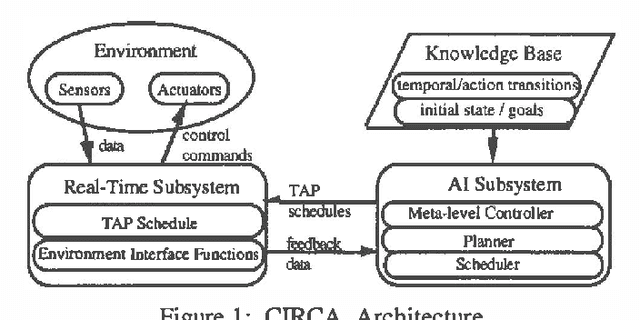
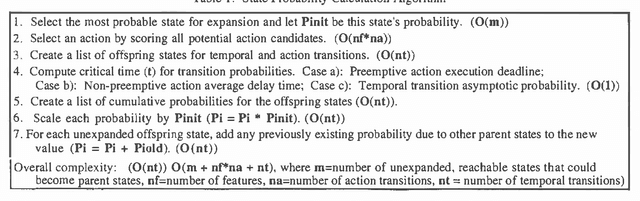
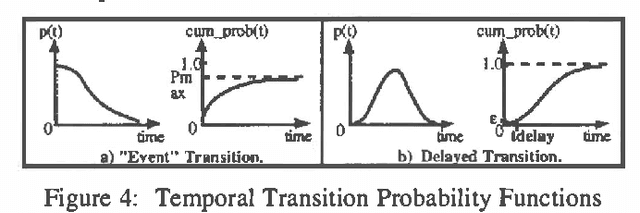
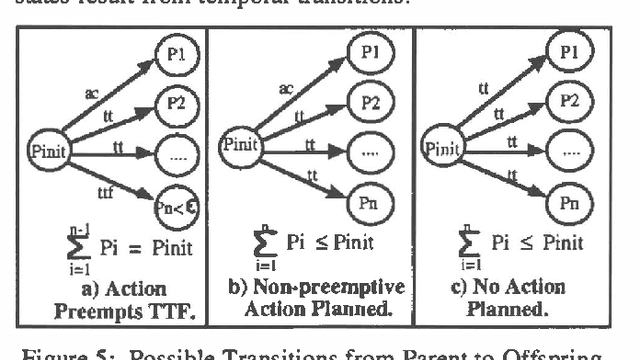
Approximate models of world state transitions are necessary when building plans for complex systems operating in dynamic environments. External event probabilities can depend on state feature values as well as time spent in that particular state. We assign temporally -dependent probability functions to state transitions. These functions are used to locally compute state probabilities, which are then used to select highly probable goal paths and eliminate improbable states. This probabilistic model has been implemented in the Cooperative Intelligent Real-time Control Architecture (CIRCA), which combines an AI planner with a separate real-time system such that plans are developed, scheduled, and executed with real-time guarantees. We present flight simulation tests that demonstrate how our probabilistic model may improve CIRCA performance.