 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlan Development using Local Probabilistic Models
Paper and Code
Feb 13, 2013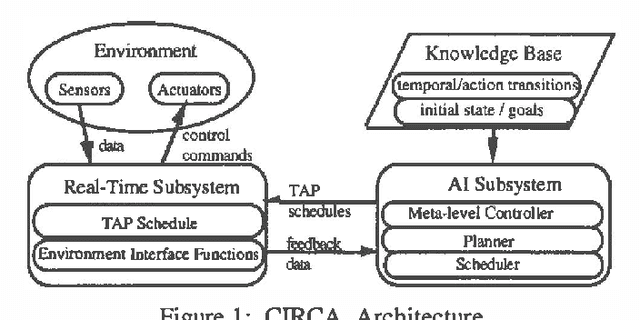
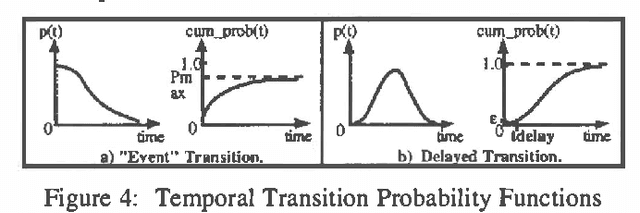
Approximate models of world state transitions are necessary when building plans for complex systems operating in dynamic environments. External event probabilities can depend on state feature values as well as time spent in that particular state. We assign temporally -dependent probability functions to state transitions. These functions are used to locally compute state probabilities, which are then used to select highly probable goal paths and eliminate improbable states. This probabilistic model has been implemented in the Cooperative Intelligent Real-time Control Architecture (CIRCA), which combines an AI planner with a separate real-time system such that plans are developed, scheduled, and executed with real-time guarantees. We present flight simulation tests that demonstrate how our probabilistic model may improve CIRCA performance.