 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLatent Variable Models in the Era of Industrial Big Data: Extension and Beyond
Aug 23, 2022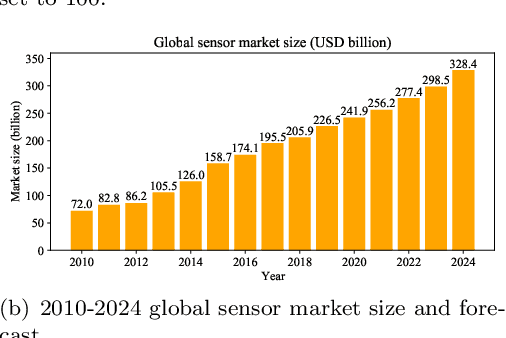
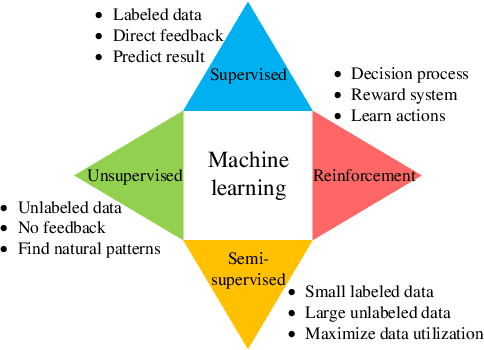
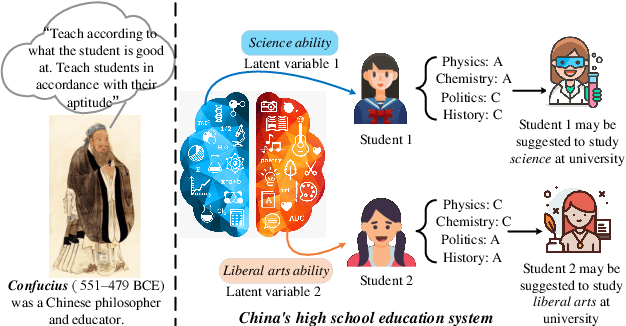
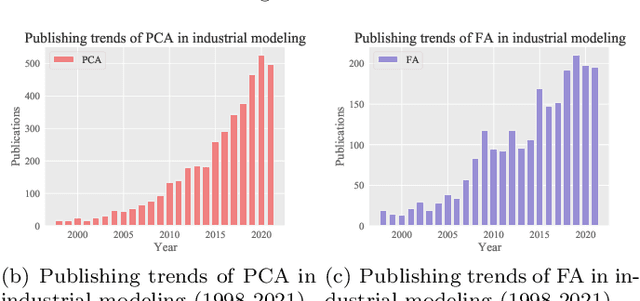
A rich supply of data and innovative algorithms have made data-driven modeling a popular technique in modern industry. Among various data-driven methods, latent variable models (LVMs) and their counterparts account for a major share and play a vital role in many industrial modeling areas. LVM can be generally divided into statistical learning-based classic LVM and neural networks-based deep LVM (DLVM). We first discuss the definitions, theories and applications of classic LVMs in detail, which serves as both a comprehensive tutorial and a brief application survey on classic LVMs. Then we present a thorough introduction to current mainstream DLVMs with emphasis on their theories and model architectures, soon afterwards provide a detailed survey on industrial applications of DLVMs. The aforementioned two types of LVM have obvious advantages and disadvantages. Specifically, classic LVMs have concise principles and good interpretability, but their model capacity cannot address complicated tasks. Neural networks-based DLVMs have sufficient model capacity to achieve satisfactory performance in complex scenarios, but it comes at sacrifices in model interpretability and efficiency. Aiming at combining the virtues and mitigating the drawbacks of these two types of LVMs, as well as exploring non-neural-network manners to build deep models, we propose a novel concept called lightweight deep LVM (LDLVM). After proposing this new idea, the article first elaborates the motivation and connotation of LDLVM, then provides two novel LDLVMs, along with thorough descriptions on their principles, architectures and merits. Finally, outlooks and opportunities are discussed, including important open questions and possible research directions.
A Data-Driven Approach for Autonomous Motion Planning and Control in Off-Road Driving Scenarios
May 25, 2018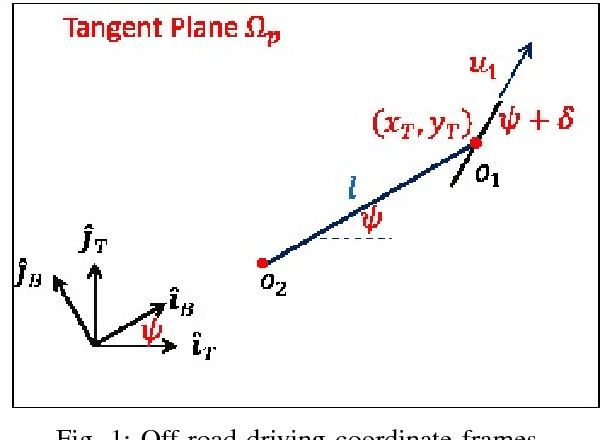
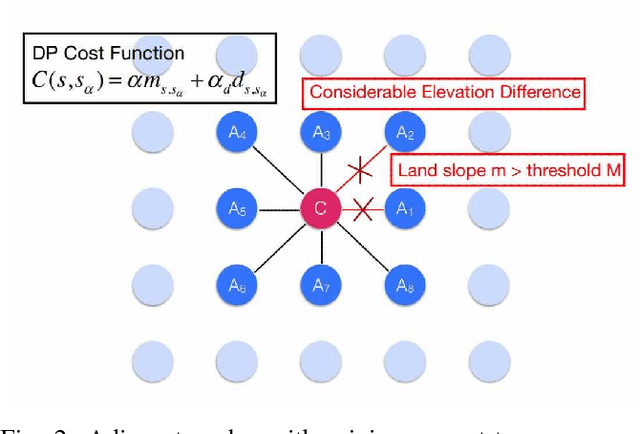
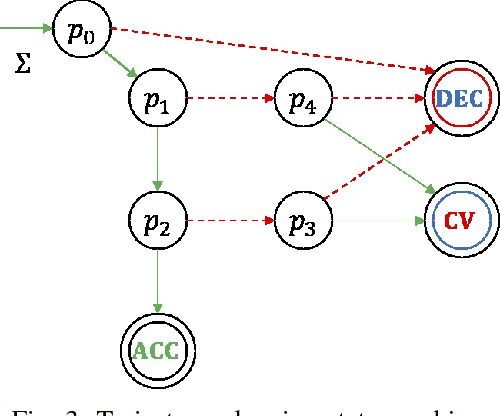
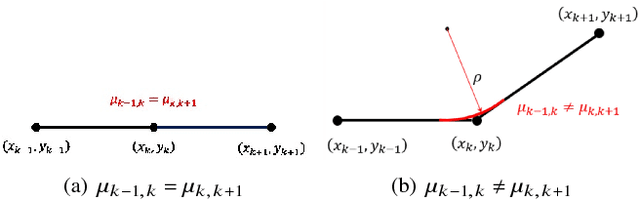
This paper presents a novel data-driven approach to vehicle motion planning and control in off-road driving scenarios. For autonomous off-road driving, environmental conditions impact terrain traversability as a function of weather, surface composition, and slope. Geographical information system (GIS) and National Centers for Environmental Information datasets are processed to provide this information for interactive planning and control system elements. A top-level global route planner (GRP) defines optimal waypoints using dynamic programming (DP). A local path planner (LPP) computes a desired trajectory between waypoints such that infeasible control states and collisions with obstacles are avoided. The LPP also updates the GRP with real-time sensing and control data. A low-level feedback controller applies feedback linearization to asymptotically track the specified LPP trajectory. Autonomous driving simulation results are presented for traversal of terrains in Oregon and Indiana case studies.