 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast and Noise-Resilient Magnetic Field Mapping on a Low-Cost UAV Using Gaussian Process Regression
Jan 31, 2023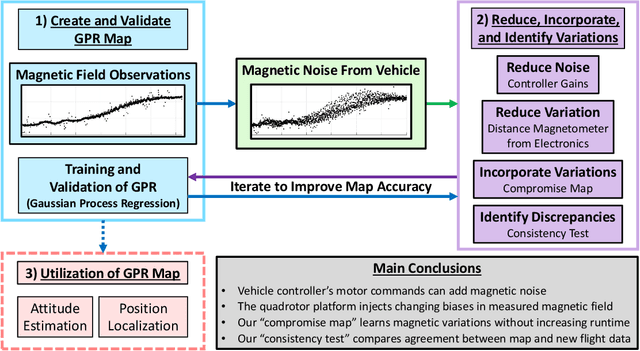

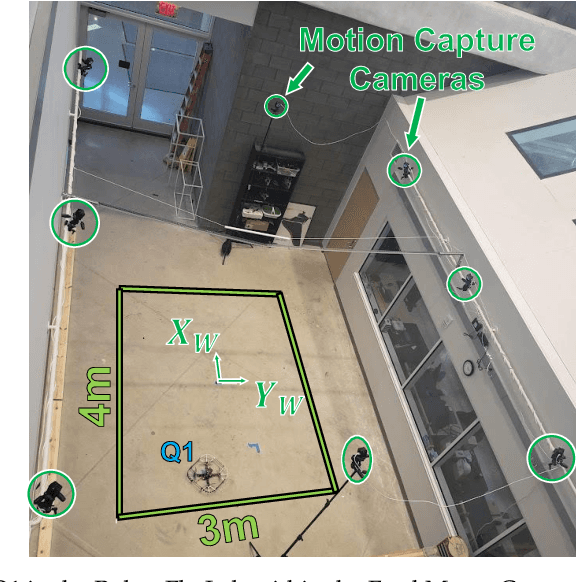

This work presents a number of techniques to improve the ability to create magnetic field maps on a UAV which can be used to quickly and reliably gather magnetic field observations at multiple altitudes in a workspace. Unfortunately, the electronics on the UAV can introduce their own magnetic fields, distorting the resultant magnetic field map. We show methods of reducing and working with UAV-induced noise to better enable magnetic fields as a sensing modality for indoor navigation. First, some gains in our flight controller create high-frequency motor commands that introduce large noise in the measured magnetic field. Next, we implement a common noise reduction method of distancing the magnetometer from other components on our UAV. Finally, we introduce what we call a compromise GPR (Gaussian process regression) map that can be trained on multiple flight tests to learn any flight-by-flight variations between UAV observation tests. We investigate the spatial density of observations used to train a GPR map then use the compromise map to define a consistency test that can indicate whether or not the magnetometer data and corresponding GPR map are appropriate to use for state estimation. The interventions we introduce in this work facilitate indoor position localization of a UAV whose estimates we found to be quite sensitive to noise generated by the UAV.
A Generalization Error Bound for Multi-class Domain Generalization
May 24, 2019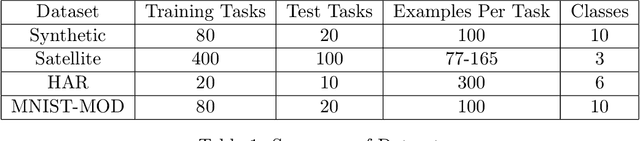

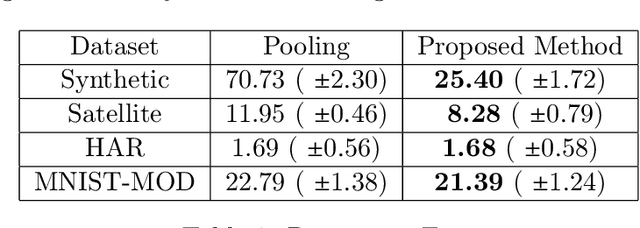
Domain generalization is the problem of assigning labels to an unlabeled data set, given several similar data sets for which labels have been provided. Despite considerable interest in this problem over the last decade, there has been no theoretical analysis in the setting of multi-class classification. In this work, we study a kernel-based learning algorithm and establish a generalization error bound that scales logarithmically in the number of classes, matching state-of-the-art bounds for multi-class classification in the conventional learning setting. We also demonstrate empirically that the proposed algorithm achieves significant performance gains compared to a pooling strategy.
Simple Regret Minimization for Contextual Bandits
Oct 17, 2018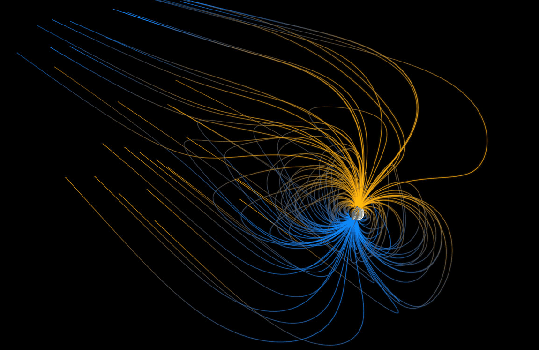
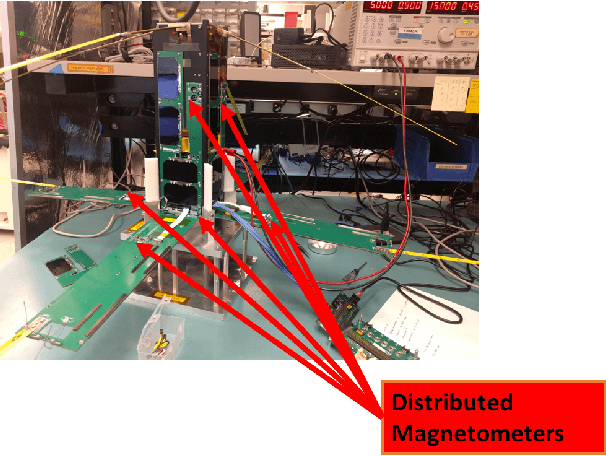
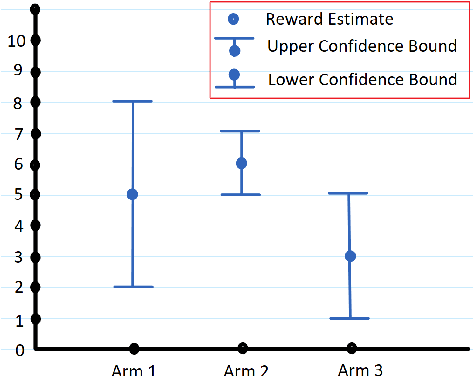
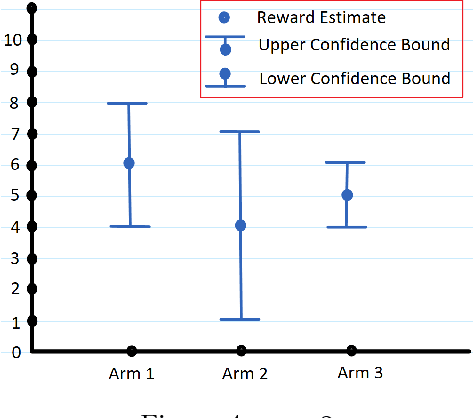
There are two variants of the classical multi-armed bandit (MAB) problem that have received considerable attention from machine learning researchers in recent years: contextual bandits and simple regret minimization. Contextual bandits are a sub-class of MABs where, at every time step, the learner has access to side information that is predictive of the best arm. Simple regret minimization assumes that the learner only incurs regret after a pure exploration phase. In this work, we study simple regret minimization for contextual bandits. Motivated by applications where the learner has separate training and autonomous modes, we assume that, the learner experiences a pure exploration phase, where feedback is received after every action but no regret is incurred, followed by a pure exploitation phase in which regret is incurred but there is no feedback. We present the Contextual-Gap algorithm and establish performance guarantees on the simple regret, i.e., the regret during the pure exploitation phase. Our experiments examine a novel application to adaptive sensor selection for magnetic field estimation in interplanetary spacecraft, and demonstrate considerable improvement over algorithms designed to minimize the cumulative regret.
Kernel Embedding Approaches to Orbit Determination of Spacecraft Clusters
Mar 01, 2018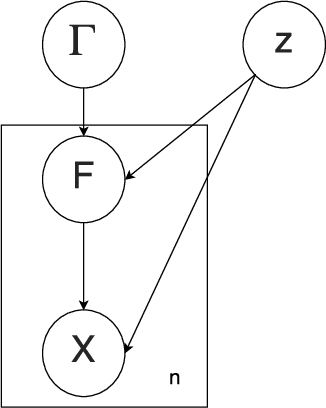

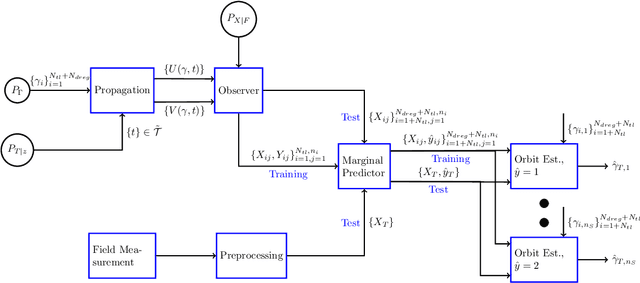

This paper presents a novel formulation and solution of orbit determination over finite time horizons as a learning problem. We present an approach to orbit determination under very broad conditions that are satisfied for n-body problems. These weak conditions allow us to perform orbit determination with noisy and highly non-linear observations such as those presented by range-rate only (Doppler only) observations. We show that domain generalization and distribution regression techniques can learn to estimate orbits of a group of satellites and identify individual satellites especially with prior understanding of correlations between orbits and provide asymptotic convergence conditions. The approach presented requires only visibility and observability of the underlying state from observations and is particularly useful for autonomous spacecraft operations using low-cost ground stations or sensors. We validate the orbit determination approach using observations of two spacecraft (GRIFEX and MCubed-2) along with synthetic datasets of multiple spacecraft deployments and lunar orbits. We also provide a comparison with the standard techniques (EKF) under highly noisy conditions.