 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Continuous-time Conflict Based Search
Jan 24, 2021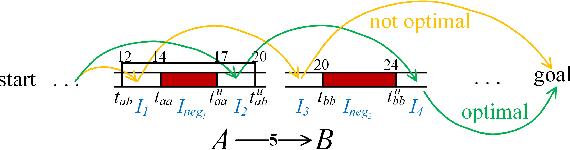

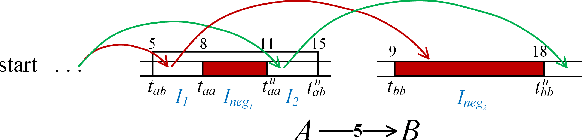

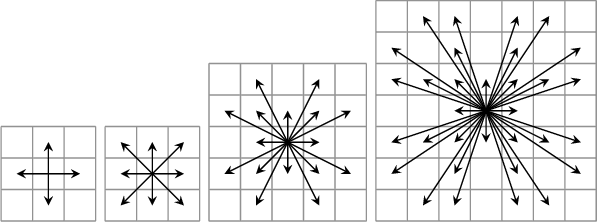
Conflict-Based Search (CBS) is a powerful algorithmic framework for optimally solving classical multi-agent path finding (MAPF) problems, where time is discretized into the time steps. Continuous-time CBS (CCBS) is a recently proposed version of CBS that guarantees optimal solutions without the need to discretize time. However, the scalability of CCBS is limited because it does not include any known improvements of CBS. In this paper, we begin to close this gap and explore how to adapt successful CBS improvements, namely, prioritizing conflicts (PC), disjoint splitting (DS), and high-level heuristics, to the continuous time setting of CCBS. These adaptions are not trivial, and require careful handling of different types of constraints, applying a generalized version of the Safe interval path planning (SIPP) algorithm, and extending the notion of cardinal conflicts. We evaluate the effect of the suggested enhancements by running experiments both on general graphs and $2^k$-neighborhood grids. CCBS with these improvements significantly outperforms vanilla CCBS, solving problems with almost twice as many agents in some cases and pushing the limits of multiagent path finding in continuous-time domains.
Multi-Agent Pathfinding: Definitions, Variants, and Benchmarks
Jun 19, 2019
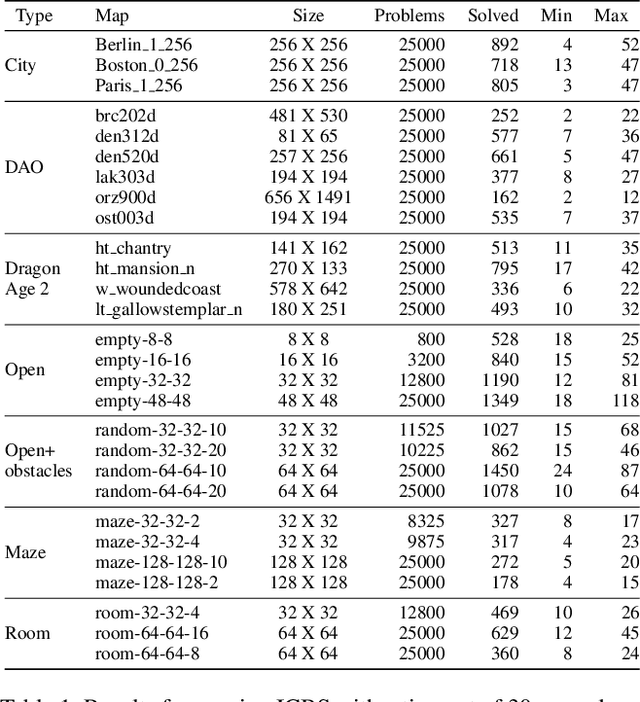
The MAPF problem is the fundamental problem of planning paths for multiple agents, where the key constraint is that the agents will be able to follow these paths concurrently without colliding with each other. Applications of MAPF include automated warehouses and autonomous vehicles. Research on MAPF has been flourishing in the past couple of years. Different MAPF research papers make different assumptions, e.g., whether agents can traverse the same road at the same time, and have different objective functions, e.g., minimize makespan or sum of agents' actions costs. These assumptions and objectives are sometimes implicitly assumed or described informally. This makes it difficult to establish appropriate baselines for comparison in research papers, as well as making it difficult for practitioners to find the papers relevant to their concrete application. This paper aims to fill this gap and support researchers and practitioners by providing a unifying terminology for describing common MAPF assumptions and objectives. In addition, we also provide pointers to two MAPF benchmarks. In particular, we introduce a new grid-based benchmark for MAPF, and demonstrate experimentally that it poses a challenge to contemporary MAPF algorithms.
Modifying Optimal SAT-based Approach to Multi-agent Path-finding Problem to Suboptimal Variants
Jul 02, 2017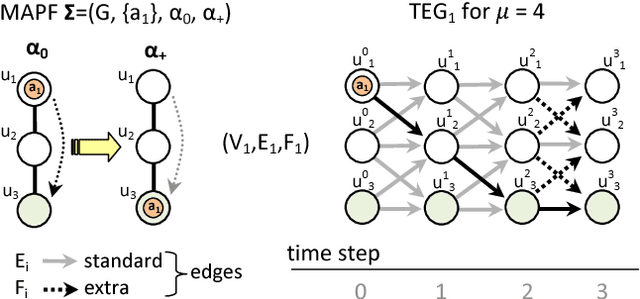

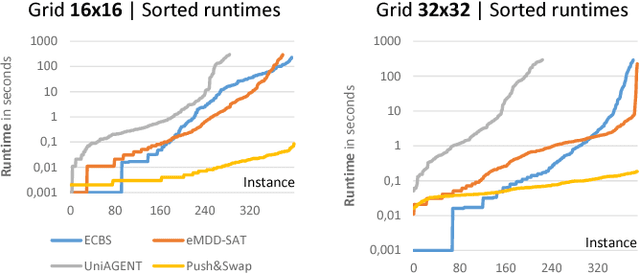

In multi-agent path finding (MAPF) the task is to find non-conflicting paths for multiple agents. In this paper we focus on finding suboptimal solutions for MAPF for the sum-of-costs variant. Recently, a SAT-based approached was developed to solve this problem and proved beneficial in many cases when compared to other search-based solvers. In this paper, we present SAT-based unbounded- and bounded-suboptimal algorithms and compare them to relevant algorithms. Experimental results show that in many case the SAT-based solver significantly outperforms the search-based solvers.