 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIs Complexity Required for Neural Network Pruning? A Case Study on Global Magnitude Pruning
Sep 29, 2022
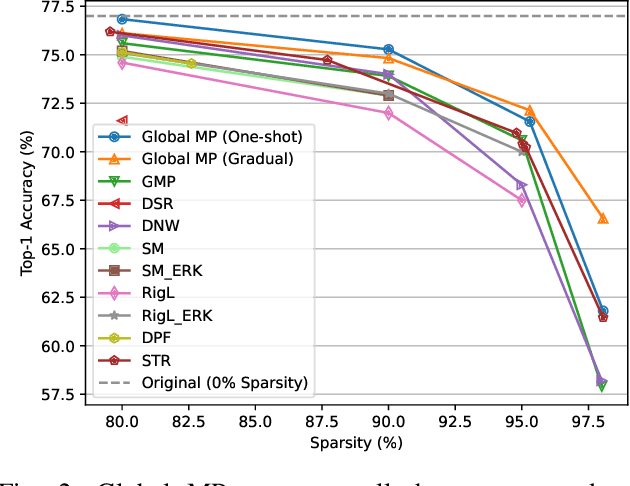
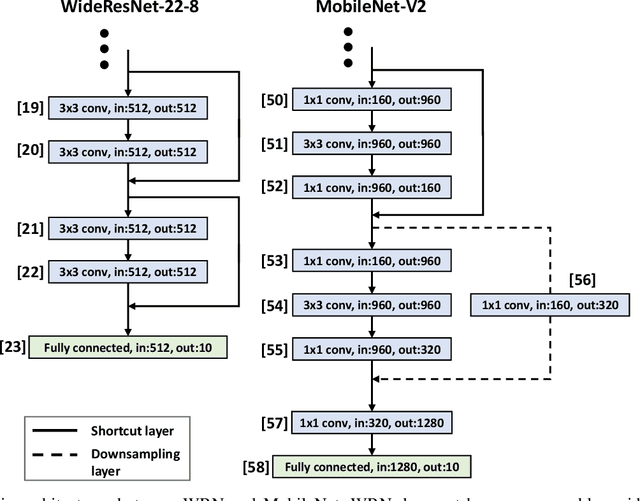
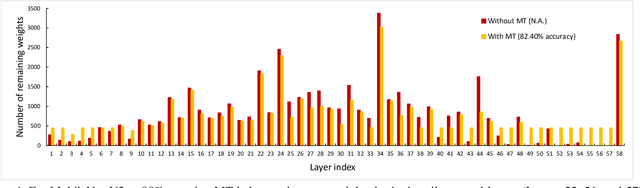
Pruning neural networks has become popular in the last decade when it was shown that a large number of weights can be safely removed from modern neural networks without compromising accuracy. Numerous pruning methods have been proposed since then, each claiming to be better than the previous. Many state-of-the-art (SOTA) techniques today rely on complex pruning methodologies utilizing importance scores, getting feedback through back-propagation or having heuristics-based pruning rules amongst others. We question this pattern of introducing complexity in order to achieve better pruning results. We benchmark these SOTA techniques against Global Magnitude Pruning (Global MP), a naive pruning baseline, to evaluate whether complexity is really needed to achieve higher performance. Global MP ranks weights in order of their magnitudes and prunes the smallest ones. Hence, in its vanilla form, it is one of the simplest pruning techniques. Surprisingly, we find that vanilla Global MP outperforms all the other SOTA techniques and achieves a new SOTA result. It also achieves good performance on FLOPs sparsification, which we find is enhanced, when pruning is conducted in a gradual fashion. We also find that Global MP is generalizable across tasks, datasets and models with superior performance. Moreover, a common issue that many pruning algorithms run into at high sparsity rates, namely, layer-collapse, can be easily fixed in Global MP by setting a minimum threshold of weights to be retained in each layer. Lastly, unlike many other SOTA techniques, Global MP does not require any additional algorithm specific hyper-parameters and is very straightforward to tune and implement. We showcase our findings on various models (WRN-28-8, ResNet-32, ResNet-50, MobileNet-V1 and FastGRNN) and multiple datasets (CIFAR-10, ImageNet and HAR-2). Code is available at https://github.com/manasgupta-1/GlobalMP.
Autonomous Aerial Cinematography In Unstructured Environments With Learned Artistic Decision-Making
Oct 15, 2019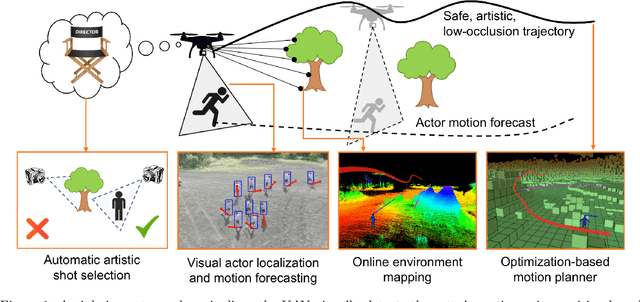
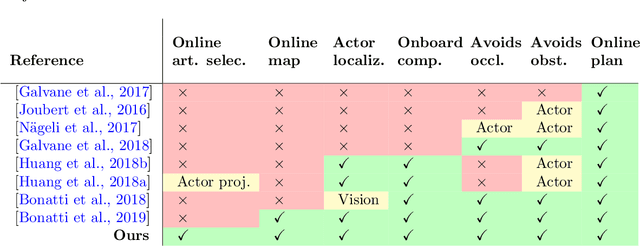
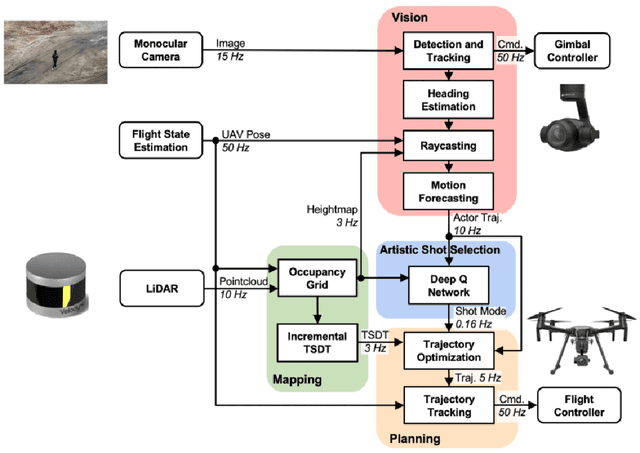
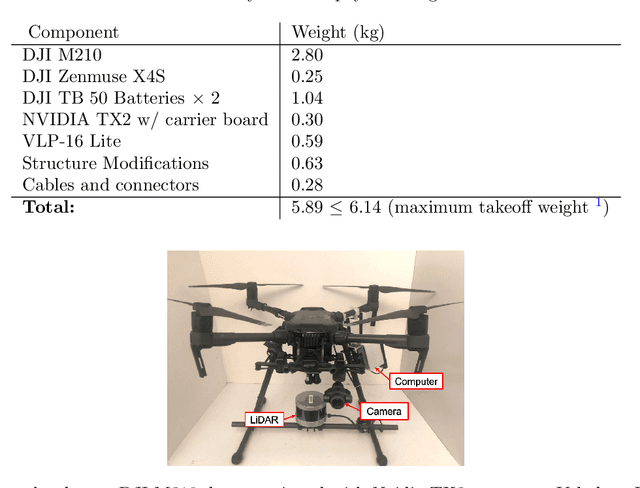
Aerial cinematography is revolutionizing industries that require live and dynamic camera viewpoints such as entertainment, sports, and security. However, safely piloting a drone while filming a moving target in the presence of obstacles is immensely taxing, often requiring multiple expert human operators. Hence, there is demand for an autonomous cinematographer that can reason about both geometry and scene context in real-time. Existing approaches do not address all aspects of this problem; they either require high-precision motion-capture systems or GPS tags to localize targets, rely on prior maps of the environment, plan for short time horizons, or only follow artistic guidelines specified before flight. In this work, we address the problem in its entirety and propose a complete system for real-time aerial cinematography that for the first time combines: (1) vision-based target estimation; (2) 3D signed-distance mapping for occlusion estimation; (3) efficient trajectory optimization for long time-horizon camera motion; and (4) learning-based artistic shot selection. We extensively evaluate our system both in simulation and in field experiments by filming dynamic targets moving through unstructured environments. Our results indicate that our system can operate reliably in the real world without restrictive assumptions. We also provide in-depth analysis and discussions for each module, with the hope that our design tradeoffs can generalize to other related applications. Videos of the complete system can be found at: https://youtu.be/ookhHnqmlaU.
End-to-End Motion Planning of Quadrotors Using Deep Reinforcement Learning
Oct 05, 2019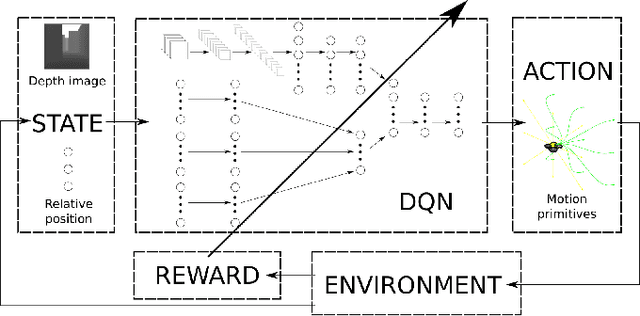
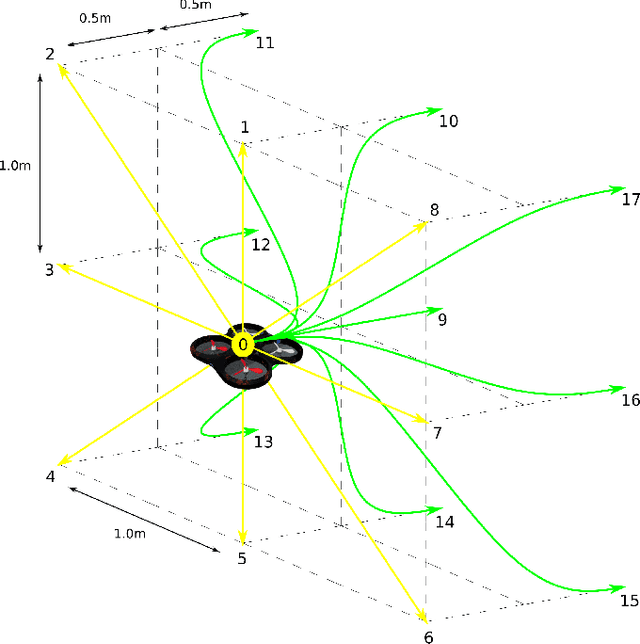
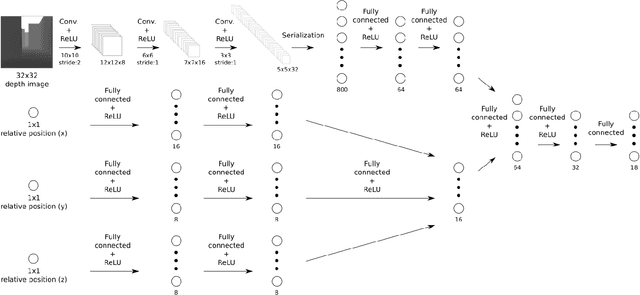
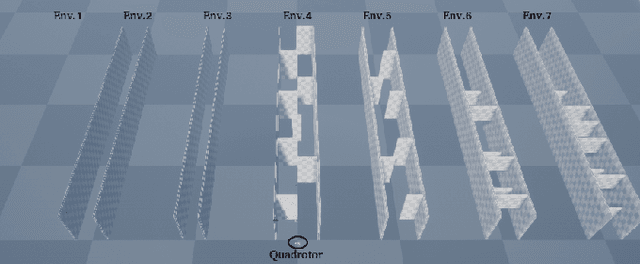
In this work, a novel, end-to-end motion planning method is proposed for quadrotor navigation in cluttered environments. The proposed method circumvents the explicit sensing-reconstructing-planning in contrast to conventional navigation algorithms. It uses raw depth images obtained from a front-facing camera and directly generates local motion plans in the form of smooth motion primitives that move a quadrotor to a goal by avoiding obstacles. Promising training and testing results are presented in both AirSim simulations and real flights with DJI F330 Quadrotor equipped with Intel RealSense D435. The proposed system in action can be found in https://youtu.be/pYvKhc8wrTM.
Can a Robot Become a Movie Director? Learning Artistic Principles for Aerial Cinematography
Apr 04, 2019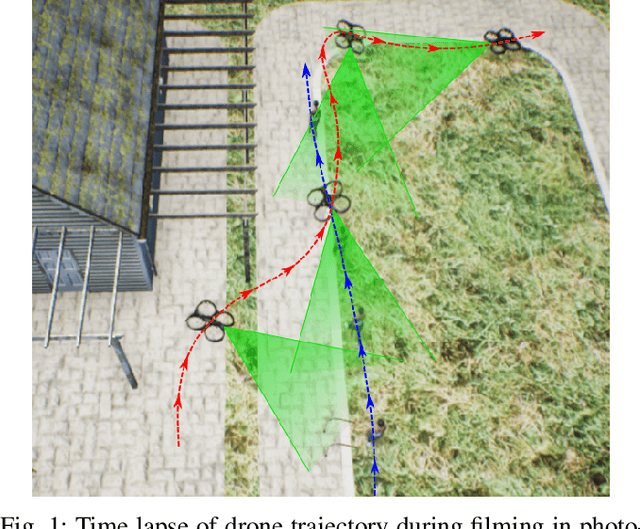
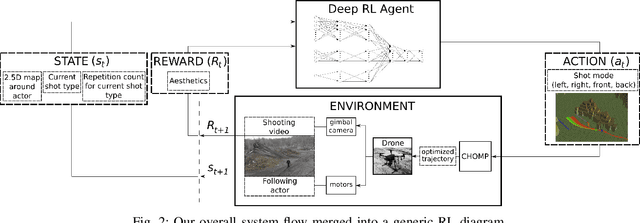

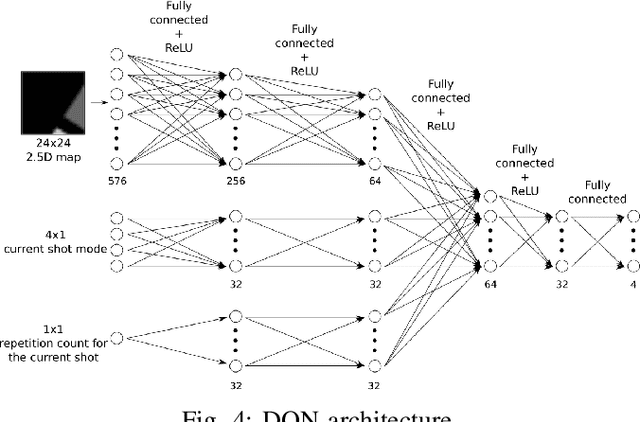
Aerial filming is becoming more and more popular thanks to the recent advances in drone technology. It invites many intriguing, unsolved problems at the intersection of aesthetical and scientific challenges. In this work, we propose an intelligent agent which supervises motion planning of a filming drone based on aesthetical values of video shots using deep reinforcement learning. Unlike the current state-of-the-art approaches which mostly require explicit guidance by a human expert, our drone learns how to make favorable shot type selections by experience. We propose a learning scheme which exploits aesthetical features of retrospective shots in order to extract a desirable policy for better prospective shots. We train our agent in realistic AirSim simulations using both hand-crafted and human reward functions. We deploy the same agent on a real DJI M210 drone in order to test generalization capability of our approach to real world conditions. To evaluate the success of our approach in the end, we conduct a comprehensive user study in which participants rate the shots taken using our method and write comments about them.