Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-to-End Motion Planning of Quadrotors Using Deep Reinforcement Learning
Paper and Code
Oct 05, 2019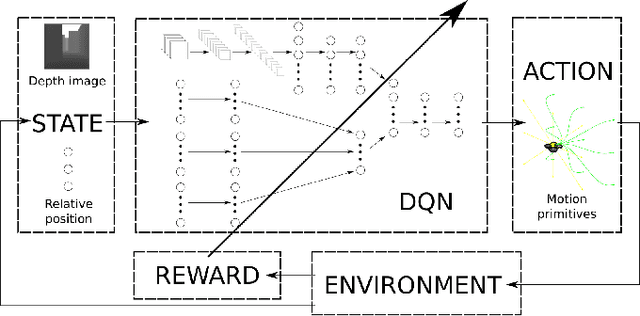
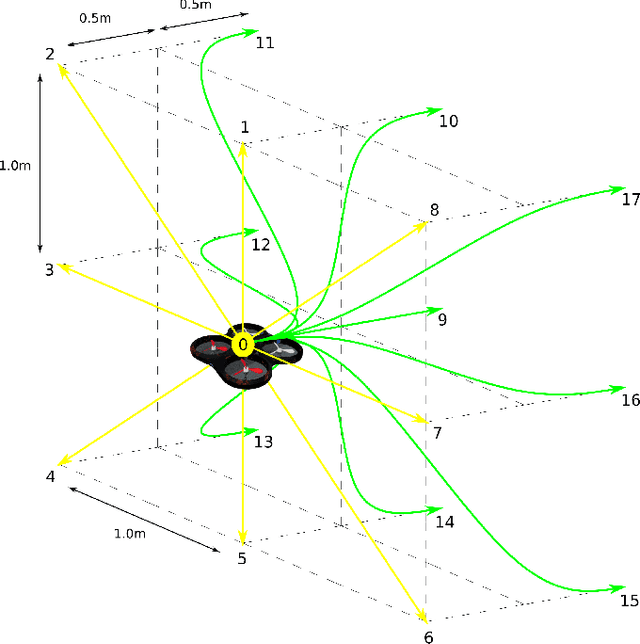
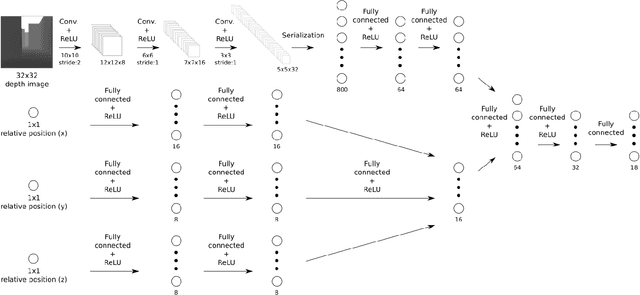
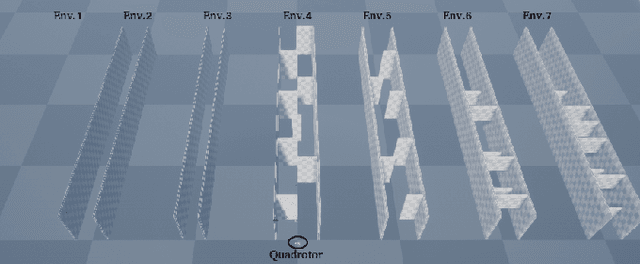
In this work, a novel, end-to-end motion planning method is proposed for quadrotor navigation in cluttered environments. The proposed method circumvents the explicit sensing-reconstructing-planning in contrast to conventional navigation algorithms. It uses raw depth images obtained from a front-facing camera and directly generates local motion plans in the form of smooth motion primitives that move a quadrotor to a goal by avoiding obstacles. Promising training and testing results are presented in both AirSim simulations and real flights with DJI F330 Quadrotor equipped with Intel RealSense D435. The proposed system in action can be found in https://youtu.be/pYvKhc8wrTM.
* IROS 2019 Workshop, Learning Representations for Planning and Control
View paper on