 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNegative Selection Approach to support Formal Verification and Validation of BlackBox Models' Input Constraints
Sep 03, 2022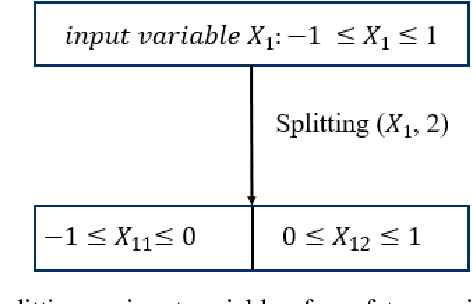
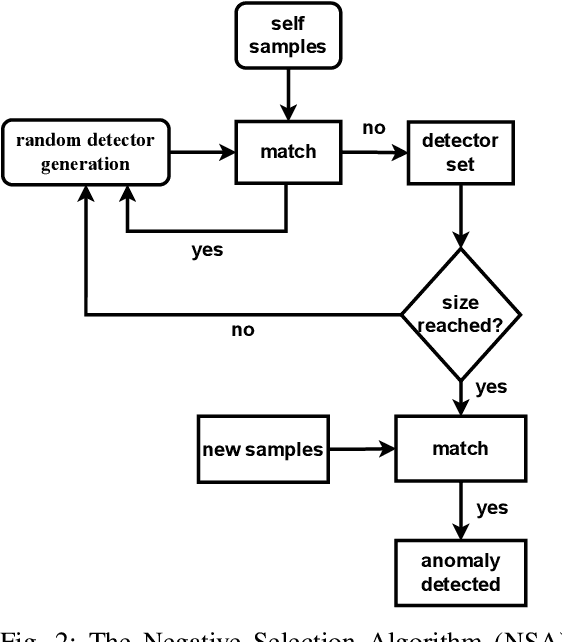
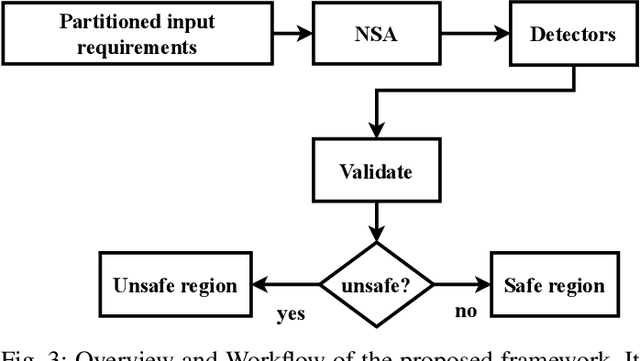
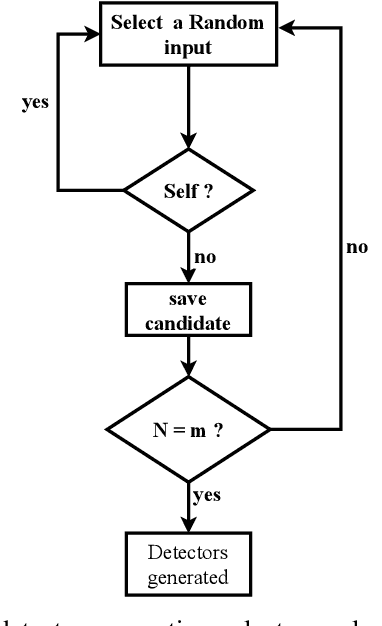
Generating unsafe sub-requirements from a partitioned input space to support verification-guided test cases for formal verification of black-box models is a challenging problem for researchers. The size of the search space makes exhaustive search computationally impractical. This paper investigates a meta-heuristic approach to search for unsafe candidate sub-requirements in partitioned input space. We present a Negative Selection Algorithm (NSA) for identifying the candidates' unsafe regions within given safety properties. The Meta-heuristic capability of the NSA algorithm made it possible to estimate vast unsafe regions while validating a subset of these regions. We utilize a parallel execution of partitioned input space to produce safe areas. The NSA based on the prior knowledge of the safe regions is used to identify candidate unsafe region areas and the Marabou framework is then used to validate the NSA results. Our preliminary experimentation and evaluation show that the procedure finds candidate unsafe sub-requirements when validated with the Marabou framework with high precision.
Stitching Dynamic Movement Primitives and Image-based Visual Servo Control
Oct 29, 2021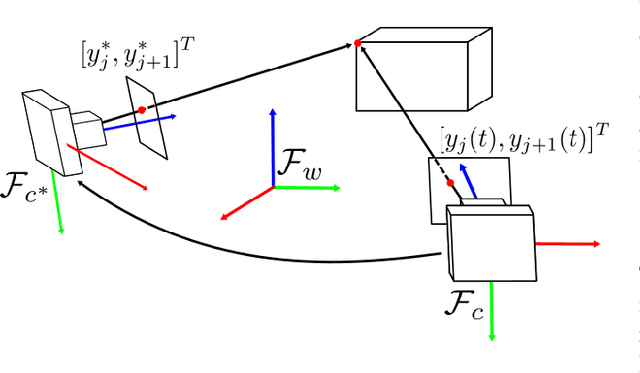
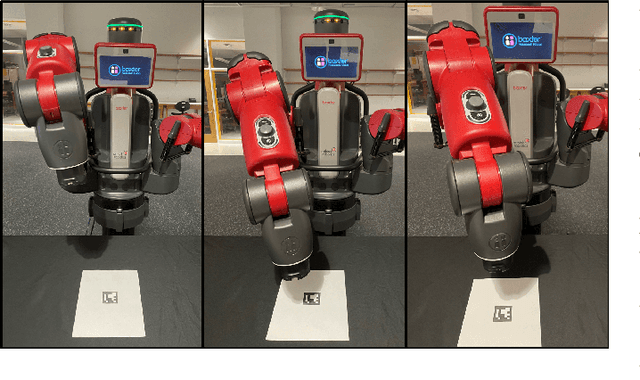
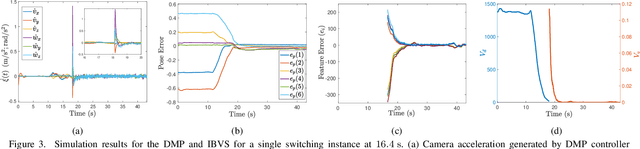

Utilizing perception for feedback control in combination with Dynamic Movement Primitive (DMP)-based motion generation for a robot's end-effector control is a useful solution for many robotic manufacturing tasks. For instance, while performing an insertion task when the hole or the recipient part is not visible in the eye-in-hand camera, a learning-based movement primitive method can be used to generate the end-effector path. Once the recipient part is in the field of view (FOV), Image-based Visual Servo (IBVS) can be used to control the motion of the robot. Inspired by such applications, this paper presents a generalized control scheme that switches between motion generation using DMPs and IBVS control. To facilitate the design, a common state space representation for the DMP and the IBVS systems is first established. Stability analysis of the switched system using multiple Lyapunov functions shows that the state trajectories converge to a bound asymptotically. The developed method is validated by two real world experiments using the eye-in-hand configuration on a Baxter research robot.
A Clustering-based Framework for Classifying Data Streams
Jun 22, 2021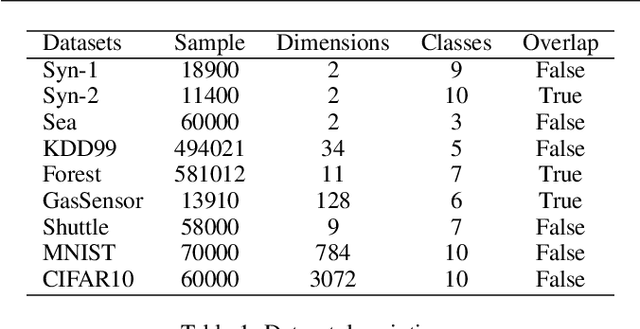
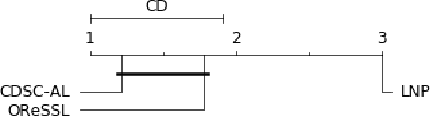
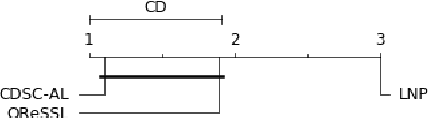
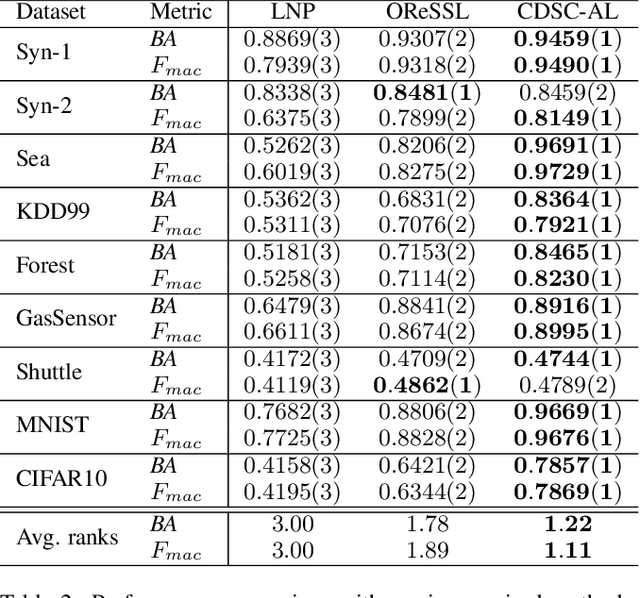
The non-stationary nature of data streams strongly challenges traditional machine learning techniques. Although some solutions have been proposed to extend traditional machine learning techniques for handling data streams, these approaches either require an initial label set or rely on specialized design parameters. The overlap among classes and the labeling of data streams constitute other major challenges for classifying data streams. In this paper, we proposed a clustering-based data stream classification framework to handle non-stationary data streams without utilizing an initial label set. A density-based stream clustering procedure is used to capture novel concepts with a dynamic threshold and an effective active label querying strategy is introduced to continuously learn the new concepts from the data streams. The sub-cluster structure of each cluster is explored to handle the overlap among classes. Experimental results and quantitative comparison studies reveal that the proposed method provides statistically better or comparable performance than the existing methods.
On the Philosophical, Cognitive and Mathematical Foundations of Symbiotic Autonomous Systems (SAS)
Feb 11, 2021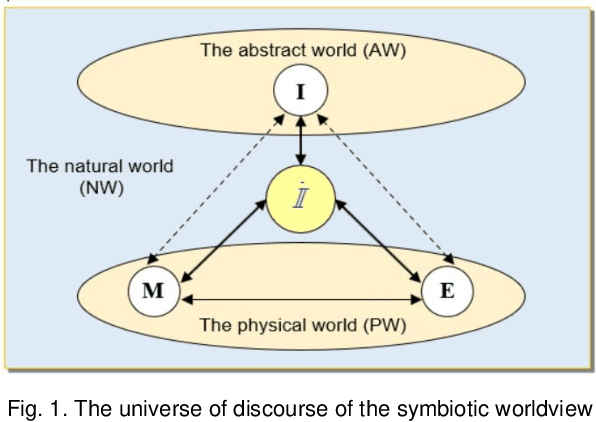
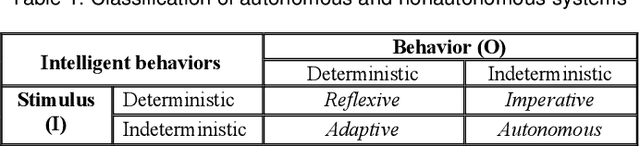
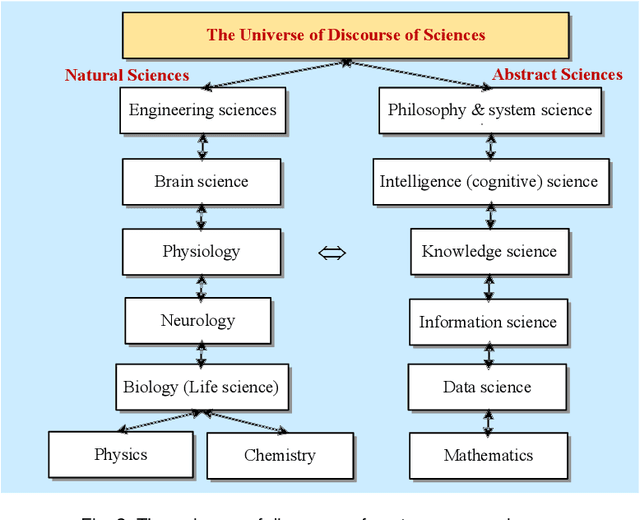
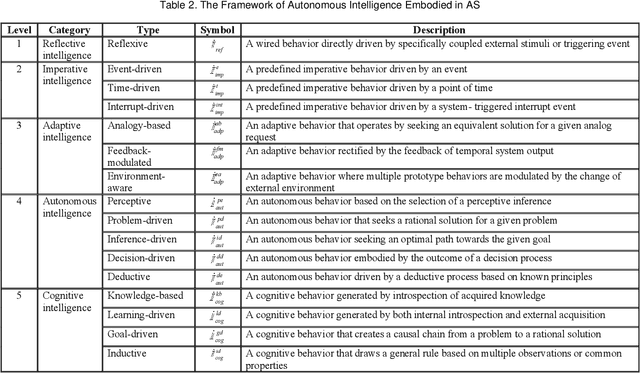
Symbiotic Autonomous Systems (SAS) are advanced intelligent and cognitive systems exhibiting autonomous collective intelligence enabled by coherent symbiosis of human-machine interactions in hybrid societies. Basic research in the emerging field of SAS has triggered advanced general AI technologies functioning without human intervention or hybrid symbiotic systems synergizing humans and intelligent machines into coherent cognitive systems. This work presents a theoretical framework of SAS underpinned by the latest advances in intelligence, cognition, computer, and system sciences. SAS are characterized by the composition of autonomous and symbiotic systems that adopt bio-brain-social-inspired and heterogeneously synergized structures and autonomous behaviors. This paper explores their cognitive and mathematical foundations. The challenge to seamless human-machine interactions in a hybrid environment is addressed. SAS-based collective intelligence is explored in order to augment human capability by autonomous machine intelligence towards the next generation of general AI, autonomous computers, and trustworthy mission-critical intelligent systems. Emerging paradigms and engineering applications of SAS are elaborated via an autonomous knowledge learning system that symbiotically works between humans and cognitive robots.
* Accepted by Phil. Trans. Royal Society (A): Math, Phys & Engg Sci., 379(219x), 2021, Oxford, UK