 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Agrobots: Trajectory Control of an Autonomous Tractor Using Type-2 Fuzzy Logic Controllers
Apr 09, 2021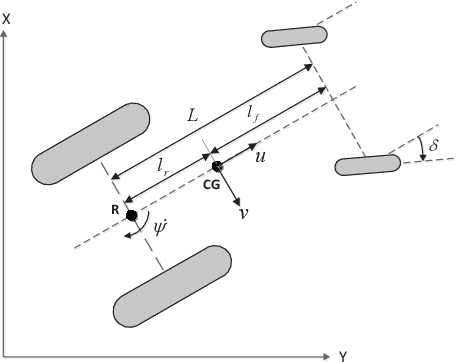
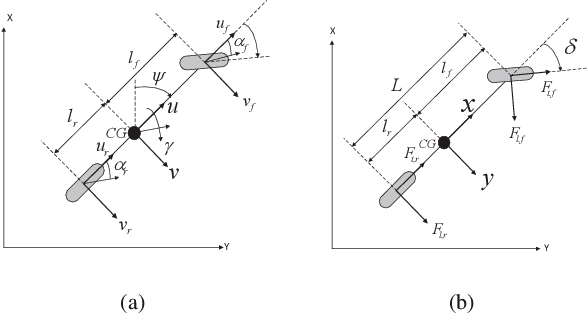
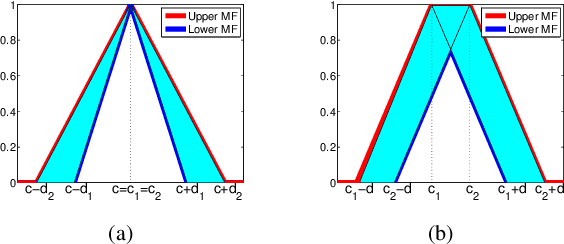
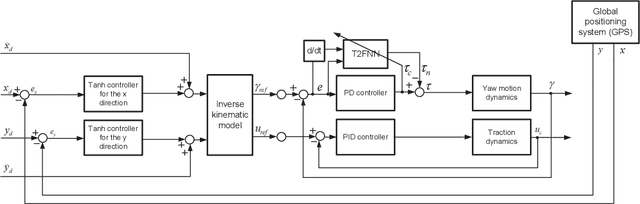
Provision of some autonomous functions to an agricultural vehicle would lighten the job of the operator but in doing so, the accuracy should not be lost to still obtain an optimal yield. Autonomous navigation of an agricultural vehicle involves the control of different dynamic subsystems, such as the yaw angle dynamics and the longitudinal speed dynamics. In this study, a proportional-integral-derivative controller is used to control the longitudinal velocity of the tractor. For the control of the yaw angle dynamics, a proportional-derivative controller works in parallel with a type-2 fuzzy neural network. In such an arrangement, the former ensures the stability of the related subsystem, while the latter learns the system dynamics and becomes the leading controller. In this way, instead of modeling the interactions between the subsystems prior to the design of model-based control, we develop a control algorithm which learns the interactions online from the measured feedback error. In addition to the control of the stated subsystems, a kinematic controller is needed to correct the errors in both the x- and the y- axis for the trajectory tracking problem of the tractor. To demonstrate the real-time abilities of the proposed control scheme, an autonomous tractor is equipped with the use of reasonably priced sensors and actuators. Experimental results show the efficacy and efficiency of the proposed learning algorithm.
On the Philosophical, Cognitive and Mathematical Foundations of Symbiotic Autonomous Systems (SAS)
Feb 11, 2021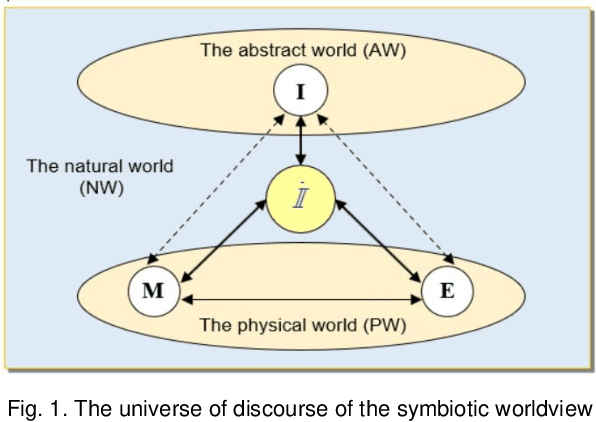
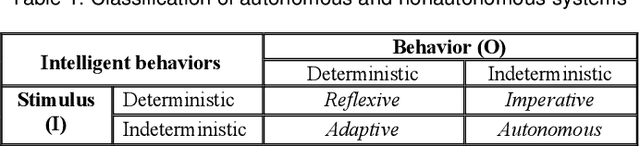
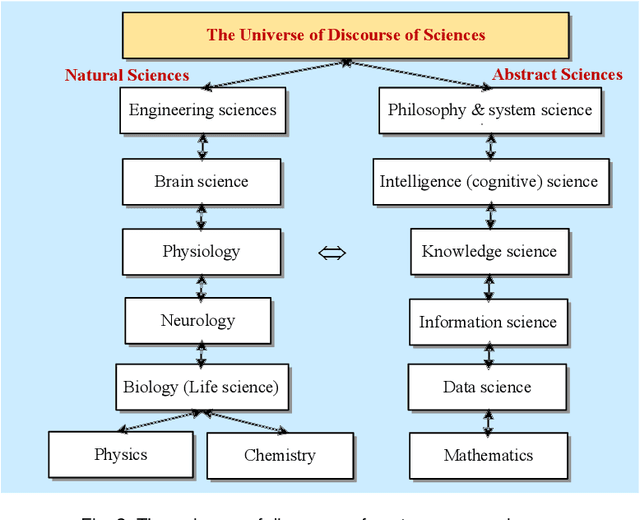
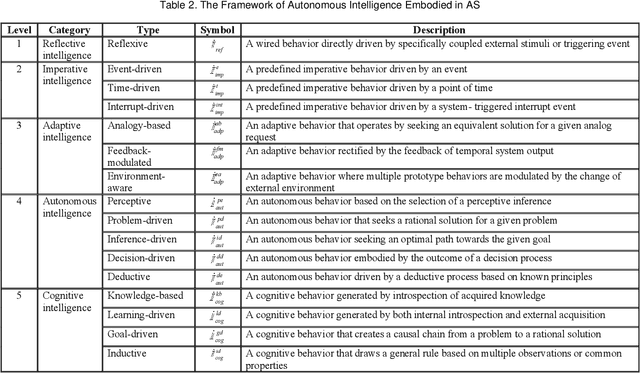
Symbiotic Autonomous Systems (SAS) are advanced intelligent and cognitive systems exhibiting autonomous collective intelligence enabled by coherent symbiosis of human-machine interactions in hybrid societies. Basic research in the emerging field of SAS has triggered advanced general AI technologies functioning without human intervention or hybrid symbiotic systems synergizing humans and intelligent machines into coherent cognitive systems. This work presents a theoretical framework of SAS underpinned by the latest advances in intelligence, cognition, computer, and system sciences. SAS are characterized by the composition of autonomous and symbiotic systems that adopt bio-brain-social-inspired and heterogeneously synergized structures and autonomous behaviors. This paper explores their cognitive and mathematical foundations. The challenge to seamless human-machine interactions in a hybrid environment is addressed. SAS-based collective intelligence is explored in order to augment human capability by autonomous machine intelligence towards the next generation of general AI, autonomous computers, and trustworthy mission-critical intelligent systems. Emerging paradigms and engineering applications of SAS are elaborated via an autonomous knowledge learning system that symbiotically works between humans and cognitive robots.
* Accepted by Phil. Trans. Royal Society (A): Math, Phys & Engg Sci., 379(219x), 2021, Oxford, UK
Short-Term Traffic Flow Prediction Using Variational LSTM Networks
Feb 18, 2020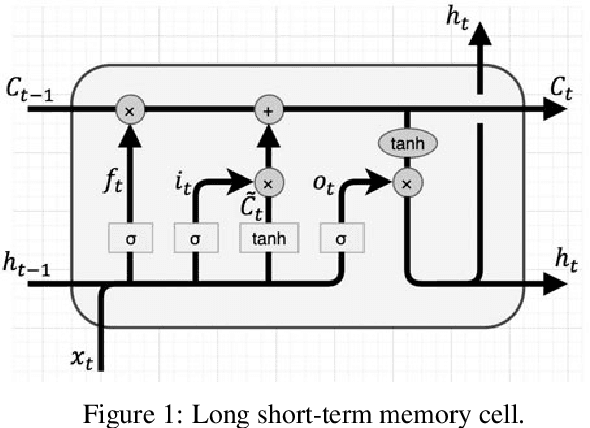

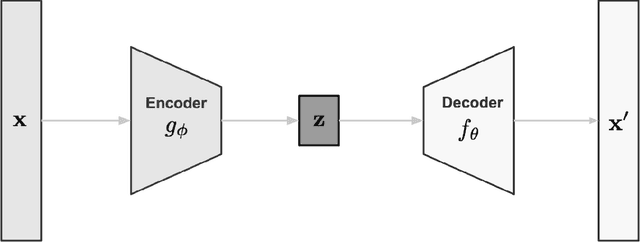

Traffic flow characteristics are one of the most critical decision-making and traffic policing factors in a region. Awareness of the predicted status of the traffic flow has prime importance in traffic management and traffic information divisions. The purpose of this research is to suggest a forecasting model for traffic flow by using deep learning techniques based on historical data in the Intelligent Transportation Systems area. The historical data collected from the Caltrans Performance Measurement Systems (PeMS) for six months in 2019. The proposed prediction model is a Variational Long Short-Term Memory Encoder in brief VLSTM-E try to estimate the flow accurately in contrast to other conventional methods. VLSTM-E can provide more reliable short-term traffic flow by considering the distribution and missing values.