 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal Time Collision Avoidance with GPU-Computed Distance Maps
Jul 02, 2024This paper presents reactive obstacle and self-collision avoidance of redundant robotic manipulators within real time kinematic feedback control using GPU-computed distance transform. The proposed framework utilizes discretized representation of the robot and the environment to calculate 3D Euclidean distance transform for task-priority based kinematic control. The environment scene is represented using a 3D GPU-voxel map created and updated from a live pointcloud data while the robotic link model is converted into a voxels offline and inserted into the voxel map according to the joint state of the robot to form the self-obstacle map. The proposed approach is evaluated using the Tiago robot, showing that all obstacle and self collision avoidance constraints are respected within one framework even with fast moving obstacles while the robot performs end-effector pose tracking in real time. A comparison of related works that depend on GPU and CPU computed distance fields is also presented to highlight the time performance as well as accuracy of the GPU distance field.
Negative Selection Approach to support Formal Verification and Validation of BlackBox Models' Input Constraints
Sep 03, 2022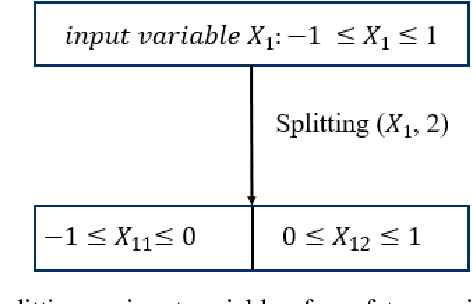
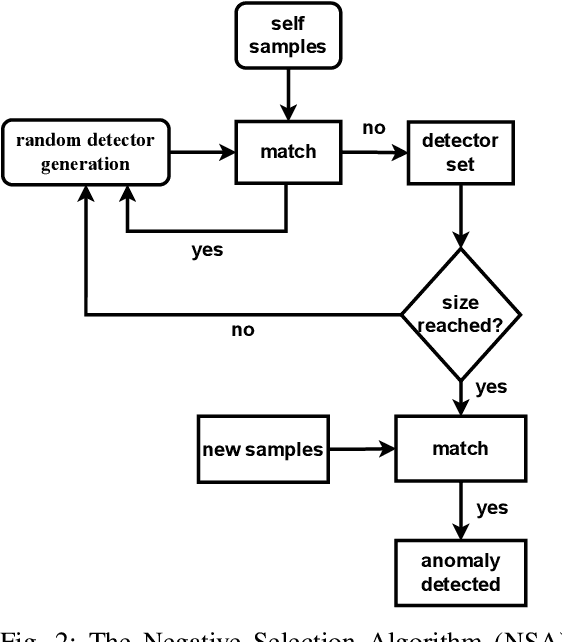
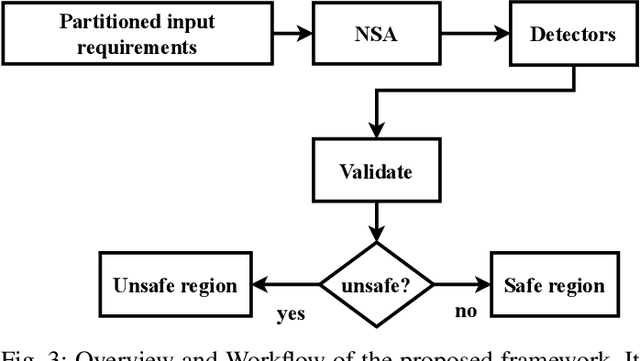
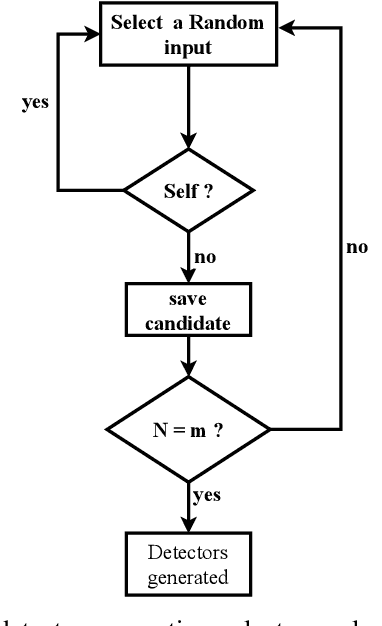
Generating unsafe sub-requirements from a partitioned input space to support verification-guided test cases for formal verification of black-box models is a challenging problem for researchers. The size of the search space makes exhaustive search computationally impractical. This paper investigates a meta-heuristic approach to search for unsafe candidate sub-requirements in partitioned input space. We present a Negative Selection Algorithm (NSA) for identifying the candidates' unsafe regions within given safety properties. The Meta-heuristic capability of the NSA algorithm made it possible to estimate vast unsafe regions while validating a subset of these regions. We utilize a parallel execution of partitioned input space to produce safe areas. The NSA based on the prior knowledge of the safe regions is used to identify candidate unsafe region areas and the Marabou framework is then used to validate the NSA results. Our preliminary experimentation and evaluation show that the procedure finds candidate unsafe sub-requirements when validated with the Marabou framework with high precision.