 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Trajectory-based Density Estimation for Geometric Structure Recovery: Theory and Applications
Oct 01, 2022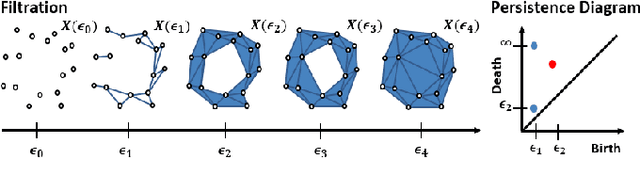


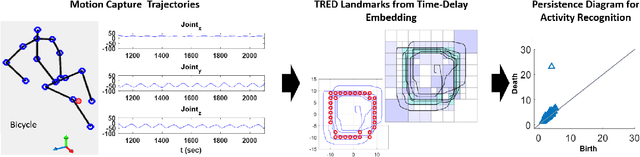
With the rise of the Internet of Things, strategies for effectively processing big data are essential for discovering meaningul insights. The time series datasets produced by groups of interconnected devices contain valuable underlying patterns. Recent works have extracted patterns from spatio-temporal datasets to aid in road network generation, activity recognition, and others. The speed and accuracy of the underlying geometry reconstruction are important in these applications. Existing methods such as kernel density estimation (KDE) have been used but are often computationally expensive. We propose modifying edge quadtrees to utilize their effective heirarchical structure. Our modification estimates density using a novel trajectory count function which provides mathematical guarantees on the stability of the count by enforcing an invariance to local perturbations. We evaluate our method's effectiveness at extracting the underlying geometry and representative subsample points. For verification, we compare against a KDE variant at extracting the underlying shape of noisy synthetic trajectories travelling alonng the shape. We compare map extraction from GPS traces against current methods. Our method significantly improves runtime while extracting the geometry better or at least comparably. We also compare against maxmin subsampling on an activity recognition data set and find a significant runtime improvement with comparable performance.
Real-time Scene Segmentation Using a Light Deep Neural Network Architecture for Autonomous Robot Navigation on Construction Sites
Jan 24, 2019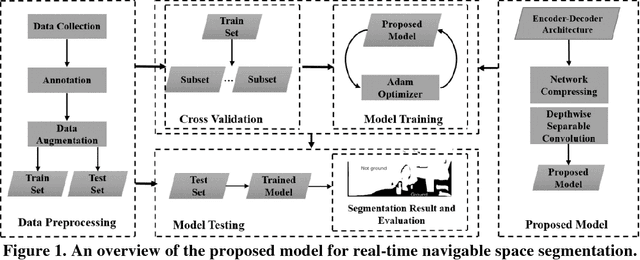
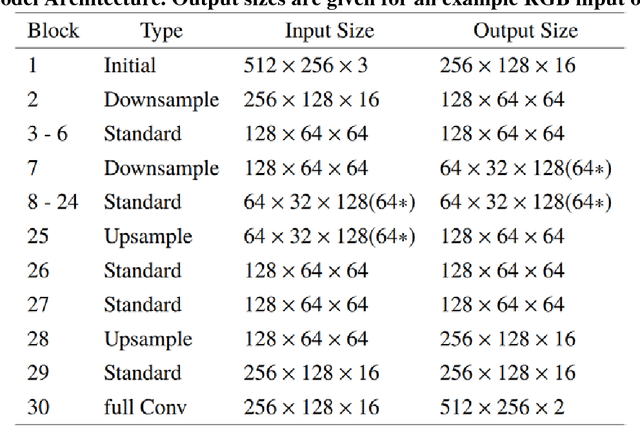
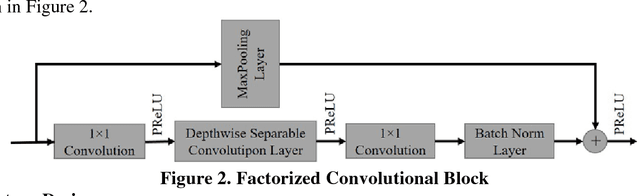
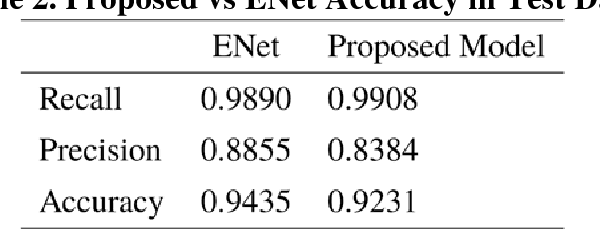
Camera-equipped unmanned vehicles (UVs) have received a lot of attention in data collection for construction monitoring applications. To develop an autonomous platform, the UV should be able to process multiple modules (e.g., context-awareness, control, localization, and mapping) on an embedded platform. Pixel-wise semantic segmentation provides a UV with the ability to be contextually aware of its surrounding environment. However, in the case of mobile robotic systems with limited computing resources, the large size of the segmentation model and high memory usage requires high computing resources, which a major challenge for mobile UVs (e.g., a small-scale vehicle with limited payload and space). To overcome this challenge, this paper presents a light and efficient deep neural network architecture to run on an embedded platform in real-time. The proposed model segments navigable space on an image sequence (i.e., a video stream), which is essential for an autonomous vehicle that is based on machine vision. The results demonstrate the performance efficiency of the proposed architecture compared to the existing models and suggest possible improvements that could make the model even more efficient, which is necessary for the future development of the autonomous robotics systems.
Vision-based Obstacle Removal System for Autonomous Ground Vehicles Using a Robotic Arm
Jan 24, 2019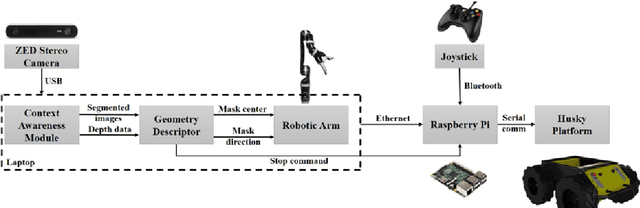
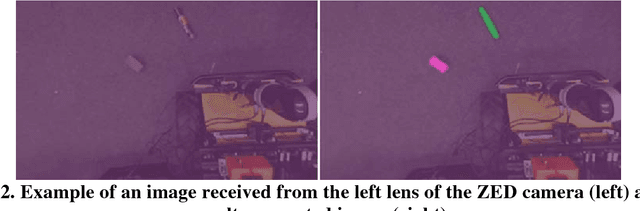
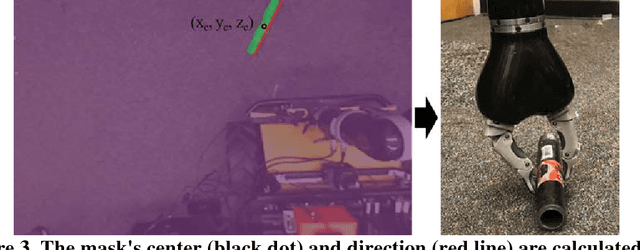
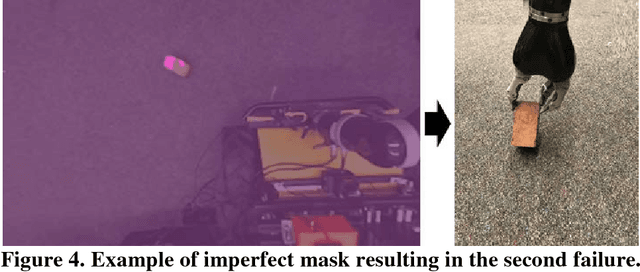
Over the past few years, the use of camera-equipped robotic platforms for data collection and visually monitoring applications has exponentially grown. Cluttered construction sites with many objects (e.g., bricks, pipes, etc.) on the ground are challenging environments for a mobile unmanned ground vehicle (UGV) to navigate. To address this issue, this study presents a mobile UGV equipped with a stereo camera and a robotic arm that can remove obstacles along the UGV's path. To achieve this objective, the surrounding environment is captured by the stereo camera and obstacles are detected. The obstacle's relative location to the UGV is sent to the robotic arm module through Robot Operating System (ROS). Then, the robotic arm picks up and removes the obstacle. The proposed method will greatly enhance the degree of automation and the frequency of data collection for construction monitoring. The proposed system is validated through two case studies. The results successfully demonstrate the detection and removal of obstacles, serving as one of the enabling factors for developing an autonomous UGV with various construction operating applications.
Building an Integrated Mobile Robotic System for Real-Time Applications in Construction
Apr 18, 2018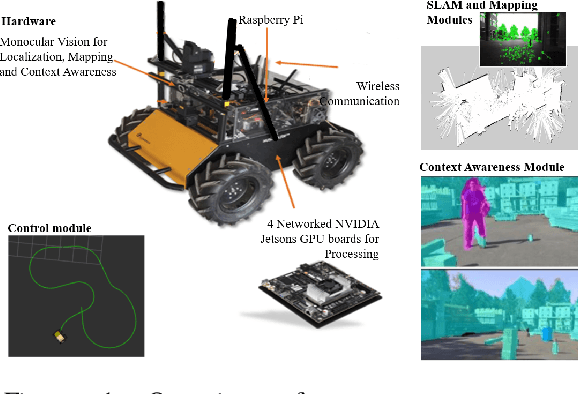
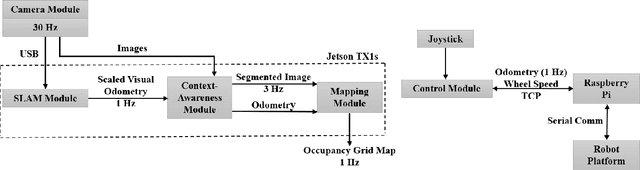
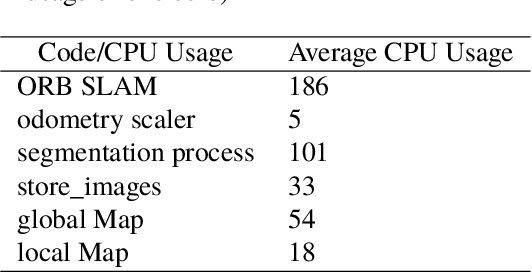
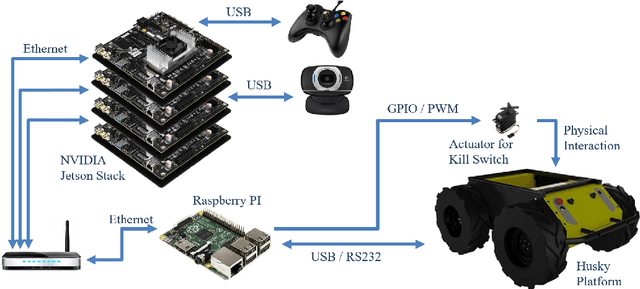
One of the major challenges of a real-time autonomous robotic system for construction monitoring is to simultaneously localize, map, and navigate over the lifetime of the robot, with little or no human intervention. Past research on Simultaneous Localization and Mapping (SLAM) and context-awareness are two active research areas in the computer vision and robotics communities. The studies that integrate both in real-time into a single modular framework for construction monitoring still need further investigation. A monocular vision system and real-time scene understanding are computationally heavy and the major state-of-the-art algorithms are tested on high-end desktops and/or servers with a high CPU- and/or GPU- computing capabilities, which affect their mobility and deployment for real-world applications. To address these challenges and achieve automation, this paper proposes an integrated robotic computer vision system, which generates a real-world spatial map of the obstacles and traversable space present in the environment in near real-time. This is done by integrating contextual Awareness and visual SLAM into a ground robotics agent. This paper presents the hardware utilization and performance of the aforementioned system for three different outdoor environments, which represent the applicability of this pipeline to diverse outdoor scenes in near real-time. The entire system is also self-contained and does not require user input, which demonstrates the potential of this computer vision system for autonomous navigation.
Geometric Learning and Topological Inference with Biobotic Networks: Convergence Analysis
Jun 30, 2016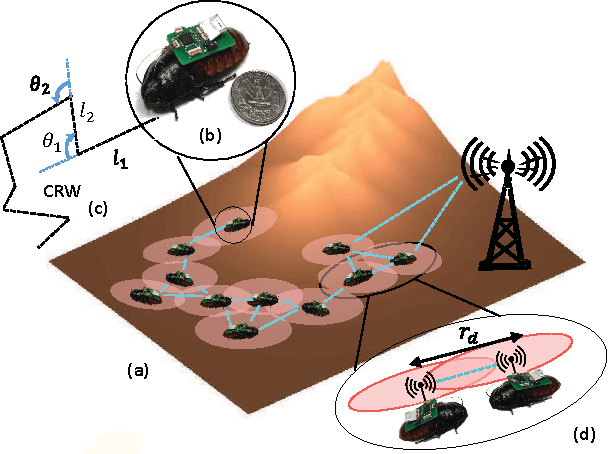
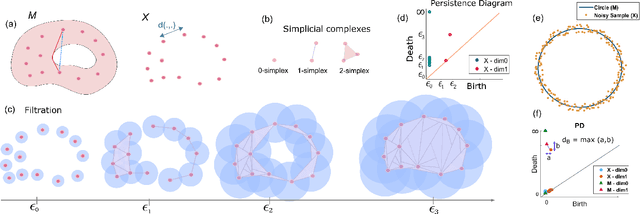
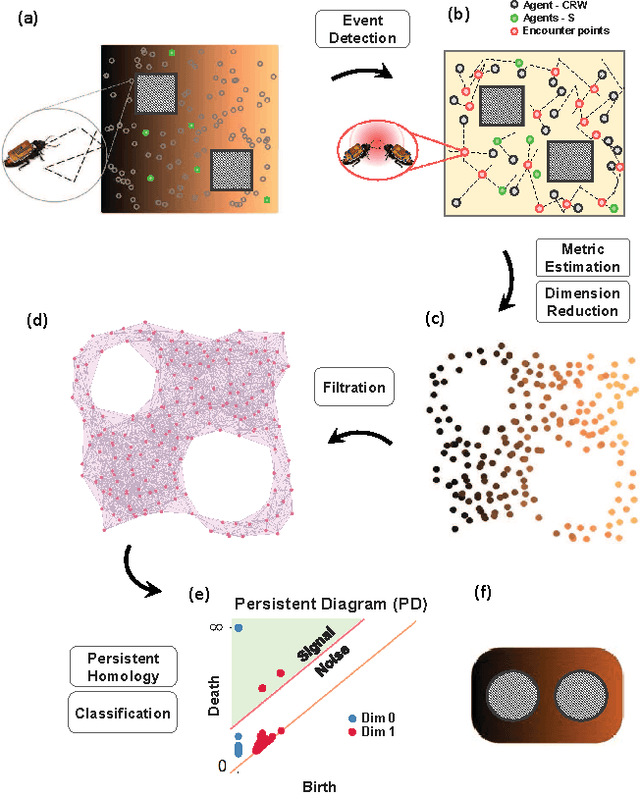
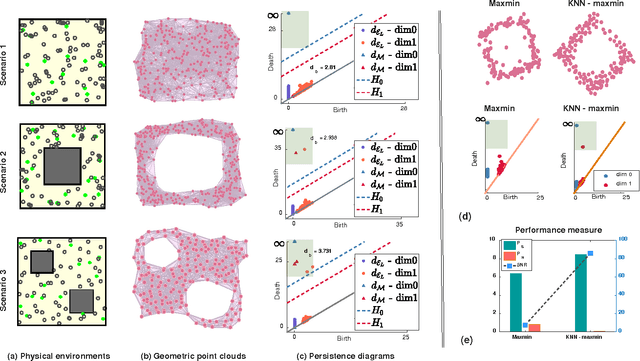
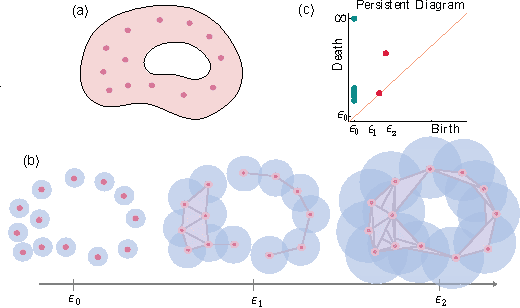
In this study, we present and analyze a framework for geometric and topological estimation for mapping of unknown environments. We consider agents mimicking motion behaviors of cyborg insects, known as biobots, and exploit coordinate-free local interactions among them to infer geometric and topological information about the environment, under minimal sensing and localization constraints. Local interactions are used to create a graphical representation referred to as the encounter graph. A metric is estimated over the encounter graph of the agents in order to construct a geometric point cloud using manifold learning techniques. Topological data analysis (TDA), in particular persistent homology, is used in order to extract topological features of the space and a classification method is proposed to infer robust features of interest (e.g. existence of obstacles). We examine the asymptotic behavior of the proposed metric in terms of the convergence to the geodesic distances in the underlying manifold of the domain, and provide stability analysis results for the topological persistence. The proposed framework and its convergences and stability analysis are demonstrated through numerical simulations and experiments.
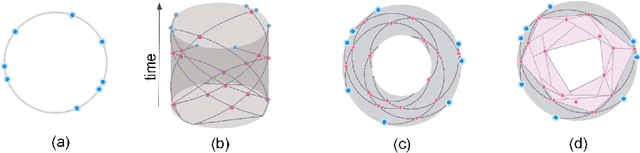
Dynamic Topological Mapping with Biobotic Swarms
Sep 29, 2015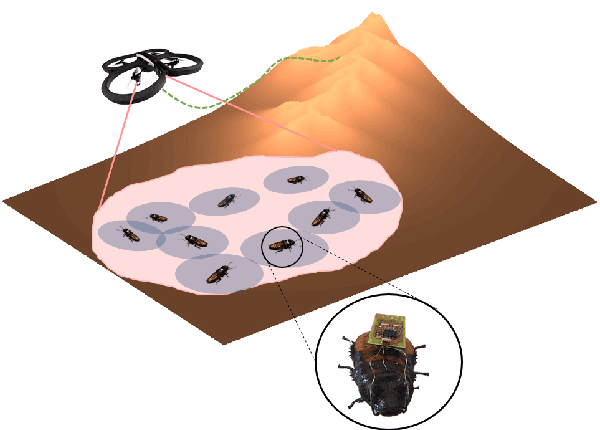
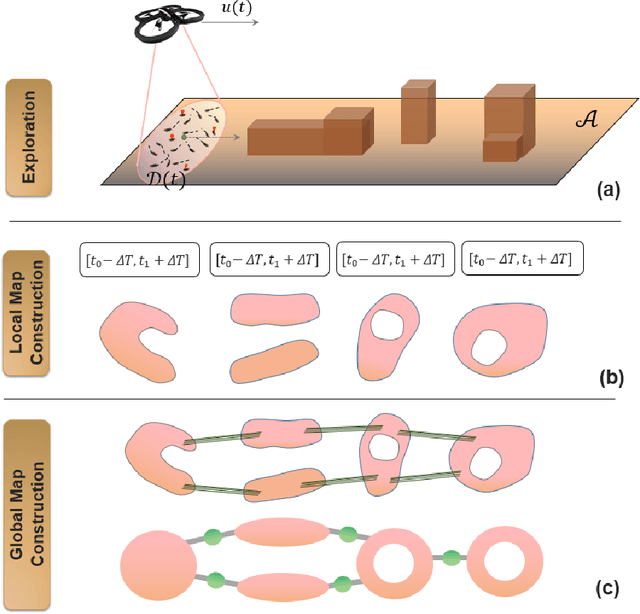
In this paper, we present an approach for dynamic exploration and mapping of unknown environments using a swarm of biobotic sensing agents, with a stochastic natural motion model and a leading agent (e.g., an unmanned aerial vehicle). The proposed robust mapping technique constructs a topological map of the environment using only encounter information from the swarm. A sliding window strategy is adopted in conjunction with a topological mapping strategy based on local interactions among the swarm in a coordinate-free fashion to obtain local maps of the environment. These maps are then merged into a global topological map which can be visualized using a graphical representation that integrates geometric as well as topological feature of the environment. Localized robust topological features are extracted using tools from topological data analysis. Simulation results have been presented to illustrate and verify the correctness of our dynamic mapping algorithm.
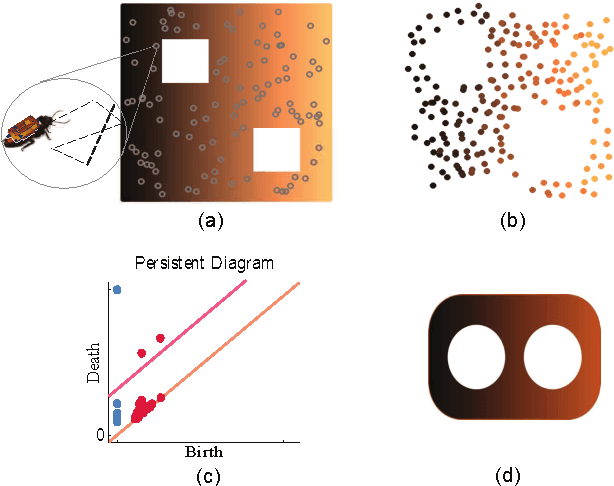
Robust Topological Feature Extraction for Mapping of Environments using Bio-Inspired Sensor Networks
Oct 17, 2014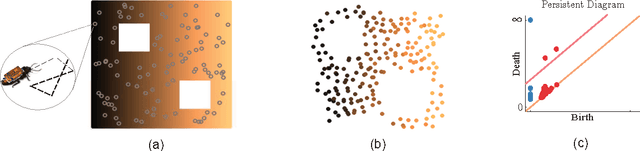


In this paper, we exploit minimal sensing information gathered from biologically inspired sensor networks to perform exploration and mapping in an unknown environment. A probabilistic motion model of mobile sensing nodes, inspired by motion characteristics of cockroaches, is utilized to extract weak encounter information in order to build a topological representation of the environment. Neighbor to neighbor interactions among the nodes are exploited to build point clouds representing spatial features of the manifold characterizing the environment based on the sampled data. To extract dominant features from sampled data, topological data analysis is used to produce persistence intervals for features, to be used for topological mapping. In order to improve robustness characteristics of the sampled data with respect to outliers, density based subsampling algorithms are employed. Moreover, a robust scale-invariant classification algorithm for persistence diagrams is proposed to provide a quantitative representation of desired features in the data. Furthermore, various strategies for defining encounter metrics with different degrees of information regarding agents' motion are suggested to enhance the precision of the estimation and classification performance of the topological method.