 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContact-Free Simultaneous Sensing of Human Heart Rate and Canine Breathing Rate for Animal Assisted Interactions
Nov 11, 2022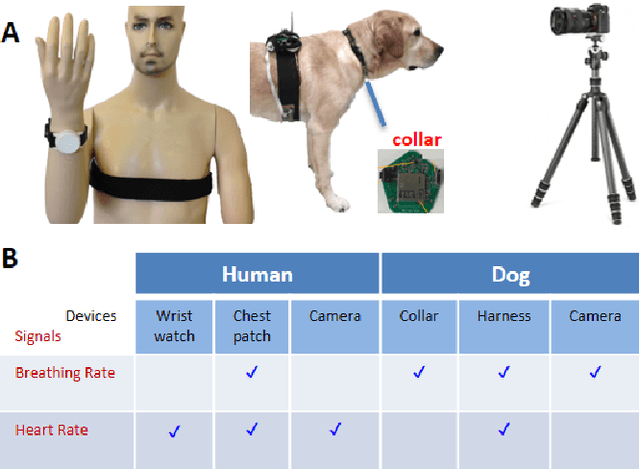
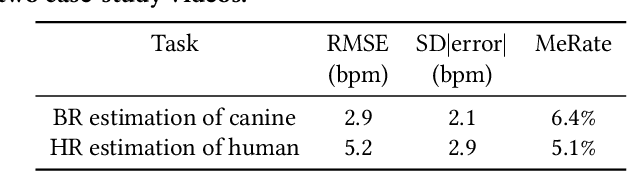
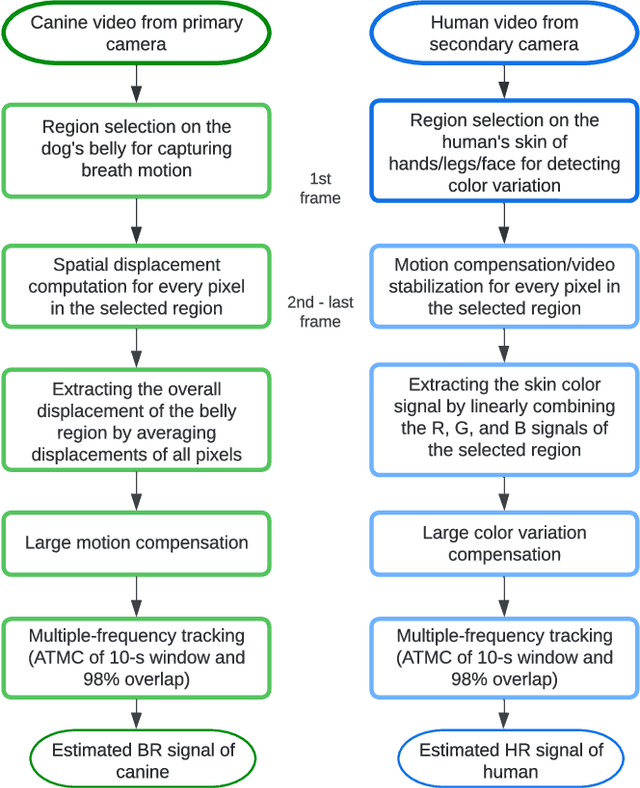
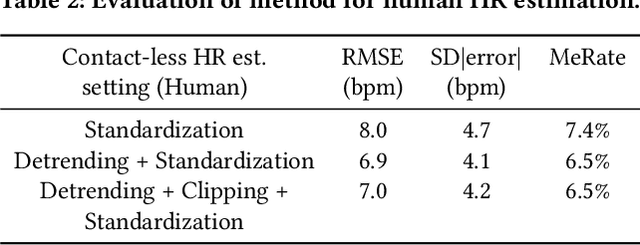
Animal Assisted Interventions (AAIs) involve pleasant interactions between humans and animals and can potentially benefit both types of participants. Research in this field may help to uncover universal insights about cross-species bonding, dynamic affect detection, and the influence of environmental factors on dyadic interactions. However, experiments evaluating these outcomes are limited to methodologies that are qualitative, subjective, and cumbersome due to the ergonomic challenges related to attaching sensors to the body. Current approaches in AAIs also face challenges when translating beyond controlled clinical environments or research contexts. These also often neglect the measurements from the animal throughout the interaction. Here, we present our preliminary effort toward a contact-free approach to facilitate AAI assessment via the physiological sensing of humans and canines using consumer-grade cameras. This initial effort focuses on verifying the technological feasibility of remotely sensing the heart rate signal of the human subject and the breathing rate signal of the dog subject while they are interacting. Small amounts of motion such as patting and involuntary body shaking or movement can be tolerated with our custom designed vision-based algorithms. The experimental results show that the physiological measurements obtained by our algorithms were consistent with those provided by the standard reference devices. With further validation and expansion to other physiological parameters, the presented approach offers great promise for many scenarios from the AAI research space to veterinary, surgical, and clinical applications.
Geometric Learning and Topological Inference with Biobotic Networks: Convergence Analysis
Jun 30, 2016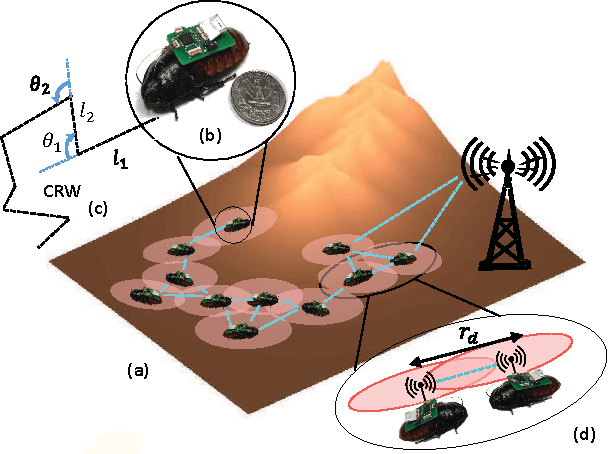
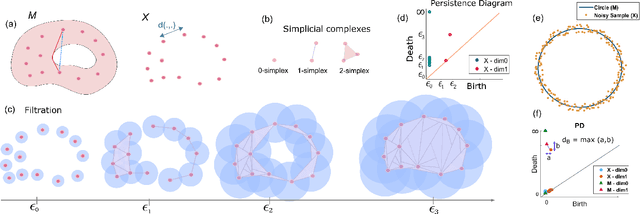
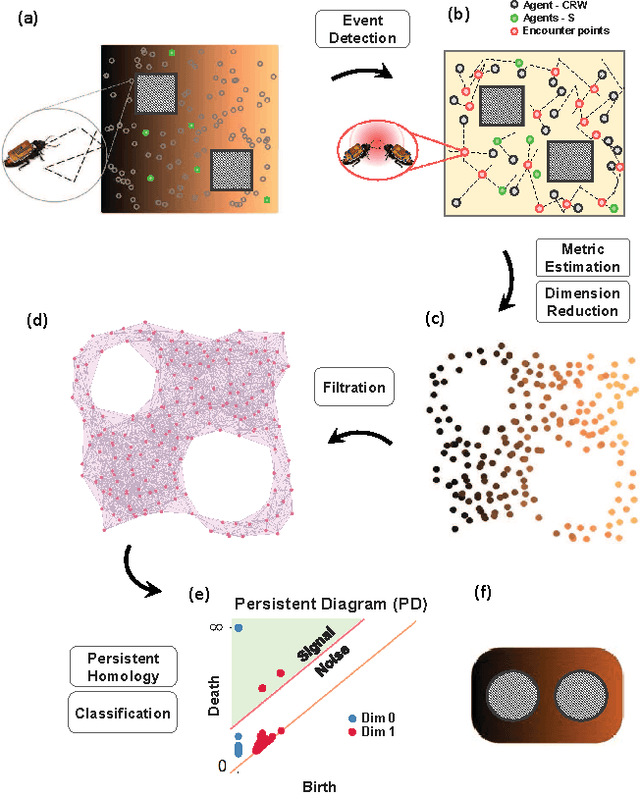
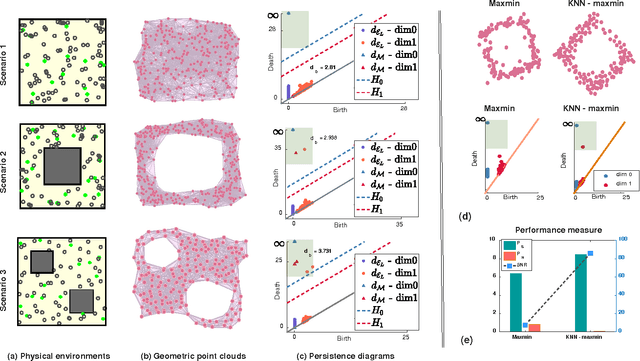
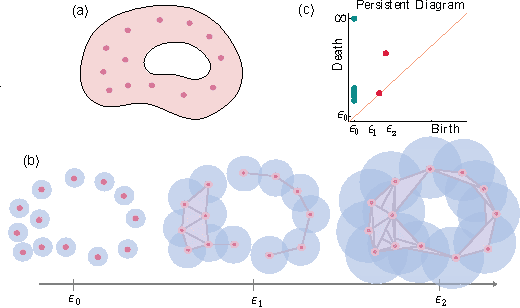
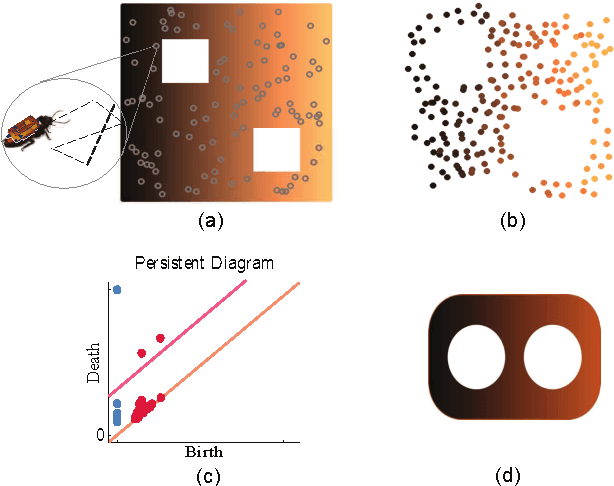
In this study, we present and analyze a framework for geometric and topological estimation for mapping of unknown environments. We consider agents mimicking motion behaviors of cyborg insects, known as biobots, and exploit coordinate-free local interactions among them to infer geometric and topological information about the environment, under minimal sensing and localization constraints. Local interactions are used to create a graphical representation referred to as the encounter graph. A metric is estimated over the encounter graph of the agents in order to construct a geometric point cloud using manifold learning techniques. Topological data analysis (TDA), in particular persistent homology, is used in order to extract topological features of the space and a classification method is proposed to infer robust features of interest (e.g. existence of obstacles). We examine the asymptotic behavior of the proposed metric in terms of the convergence to the geodesic distances in the underlying manifold of the domain, and provide stability analysis results for the topological persistence. The proposed framework and its convergences and stability analysis are demonstrated through numerical simulations and experiments.
Dynamic Topological Mapping with Biobotic Swarms
Sep 29, 2015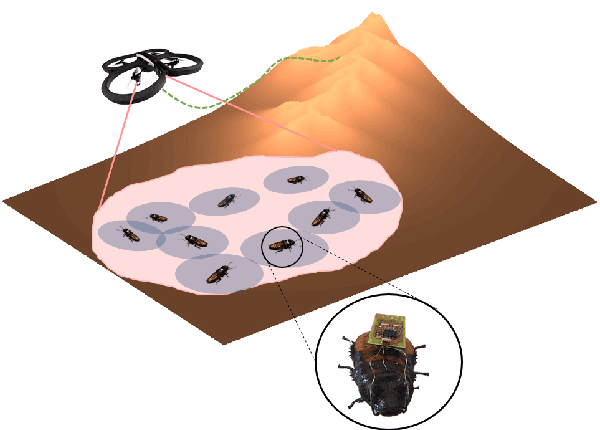
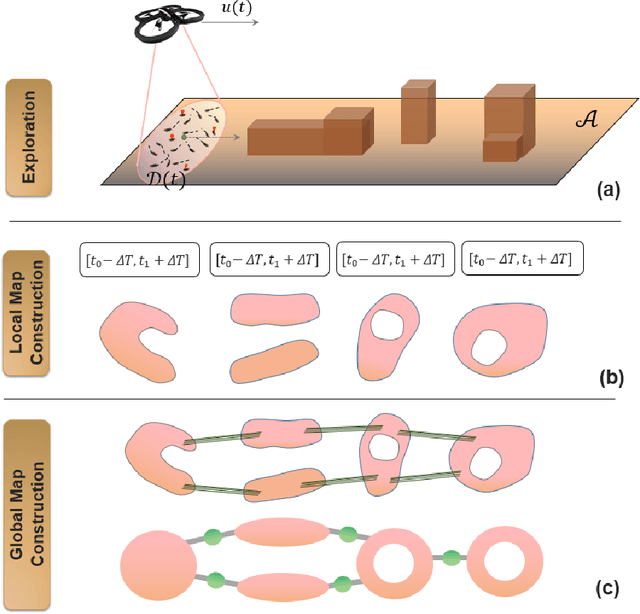
In this paper, we present an approach for dynamic exploration and mapping of unknown environments using a swarm of biobotic sensing agents, with a stochastic natural motion model and a leading agent (e.g., an unmanned aerial vehicle). The proposed robust mapping technique constructs a topological map of the environment using only encounter information from the swarm. A sliding window strategy is adopted in conjunction with a topological mapping strategy based on local interactions among the swarm in a coordinate-free fashion to obtain local maps of the environment. These maps are then merged into a global topological map which can be visualized using a graphical representation that integrates geometric as well as topological feature of the environment. Localized robust topological features are extracted using tools from topological data analysis. Simulation results have been presented to illustrate and verify the correctness of our dynamic mapping algorithm.