 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalyzing and Mitigating Negation Artifacts using Data Augmentation for Improving ELECTRA-Small Model Accuracy
Nov 09, 2025Pre-trained models for natural language inference (NLI) often achieve high performance on benchmark datasets by using spurious correlations, or dataset artifacts, rather than understanding language touches such as negation. In this project, we investigate the performance of an ELECTRA-small model fine-tuned on the Stanford Natural Language Inference (SNLI) dataset, focusing on its handling of negation. Through analysis, we identify that the model struggles with correctly classifying examples containing negation. To address this, we augment the training data with contrast sets and adversarial examples emphasizing negation. Our results demonstrate that this targeted data augmentation improves the model's accuracy on negation-containing examples without adversely affecting overall performance, therefore mitigating the identified dataset artifact.
Toward Automated Virtual Assembly for Prefabricated Construction: Construction Sequencing through Simulated BIM
Mar 14, 2020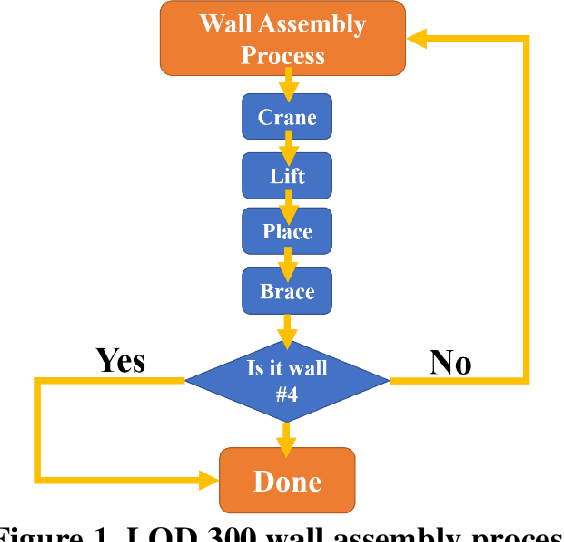
To adhere to the stringent time and budget requirements of construction projects, contractors are utilizing prefabricated construction methods to expedite the construction process. Prefabricated construction methods require an adequate schedule and understanding by the contractors and constructors to be successful. The specificity of prefabricated construction often leads to inefficient scheduling and costly rework time. The designer, contractor, and constructors must have a strong understanding of the assembly process to experience the full benefits of the method. At the root of understanding the assembly process is visualizing how the process is intended to be performed. Currently, a virtual construction model is used to explain and better visualize the construction process. However, creating a virtual construction model is currently time consuming and requires experienced personnel. The proposed simulation of the virtual assembly will increase the automation of virtual construction modeling by implementing the data available in a building information modeling (BIM) model. This paper presents various factors (i.e., formalization of construction sequence based on the level of development (LOD)) that needs to be addressed for the development of automated virtual assembly. Two case studies are presented to demonstrate these factors.
Vision-based Obstacle Removal System for Autonomous Ground Vehicles Using a Robotic Arm
Jan 24, 2019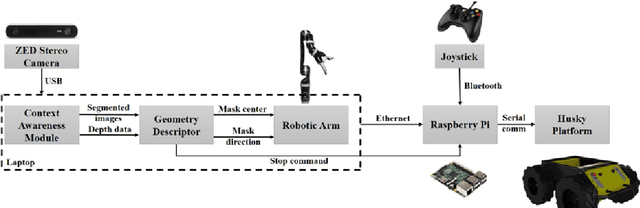
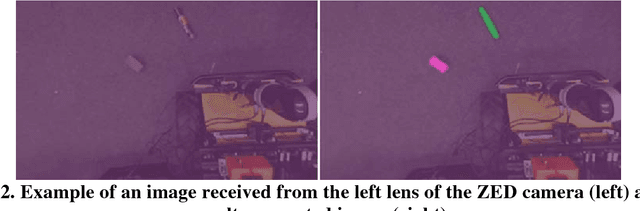
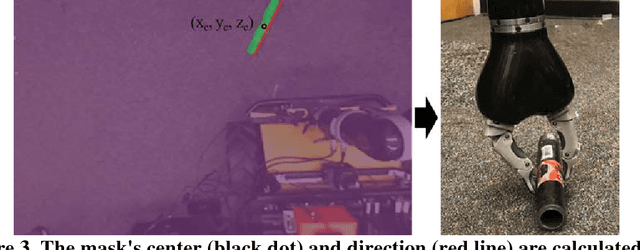
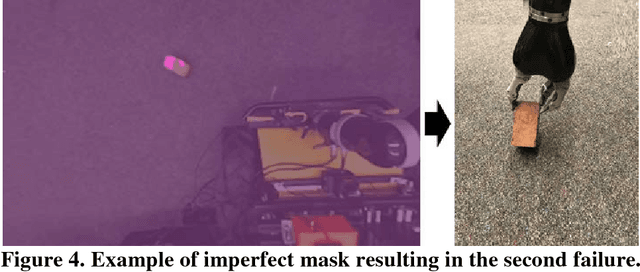
Over the past few years, the use of camera-equipped robotic platforms for data collection and visually monitoring applications has exponentially grown. Cluttered construction sites with many objects (e.g., bricks, pipes, etc.) on the ground are challenging environments for a mobile unmanned ground vehicle (UGV) to navigate. To address this issue, this study presents a mobile UGV equipped with a stereo camera and a robotic arm that can remove obstacles along the UGV's path. To achieve this objective, the surrounding environment is captured by the stereo camera and obstacles are detected. The obstacle's relative location to the UGV is sent to the robotic arm module through Robot Operating System (ROS). Then, the robotic arm picks up and removes the obstacle. The proposed method will greatly enhance the degree of automation and the frequency of data collection for construction monitoring. The proposed system is validated through two case studies. The results successfully demonstrate the detection and removal of obstacles, serving as one of the enabling factors for developing an autonomous UGV with various construction operating applications.