 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStageACT: Stage-Conditioned Imitation for Robust Humanoid Door Opening
Sep 16, 2025Humanoid robots promise to operate in everyday human environments without requiring modifications to the surroundings. Among the many skills needed, opening doors is essential, as doors are the most common gateways in built spaces and often limit where a robot can go. Door opening, however, poses unique challenges as it is a long-horizon task under partial observability, such as reasoning about the door's unobservable latch state that dictates whether the robot should rotate the handle or push the door. This ambiguity makes standard behavior cloning prone to mode collapse, yielding blended or out-of-sequence actions. We introduce StageACT, a stage-conditioned imitation learning framework that augments low-level policies with task-stage inputs. This effective addition increases robustness to partial observability, leading to higher success rates and shorter completion times. On a humanoid operating in a real-world office environment, StageACT achieves a 55% success rate on previously unseen doors, more than doubling the best baseline. Moreover, our method supports intentional behavior guidance through stage prompting, enabling recovery behaviors. These results highlight stage conditioning as a lightweight yet powerful mechanism for long-horizon humanoid loco-manipulation.
Learning Hierarchical Teaching in Cooperative Multiagent Reinforcement Learning
Mar 07, 2019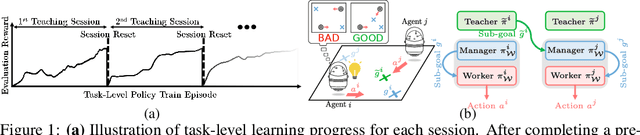
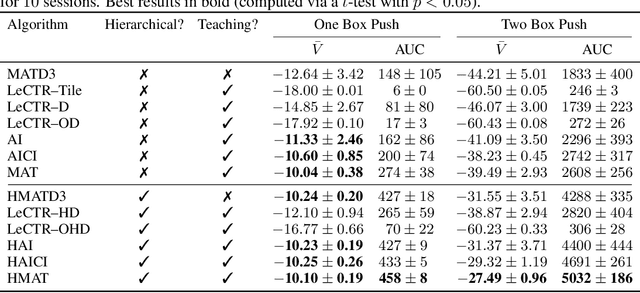
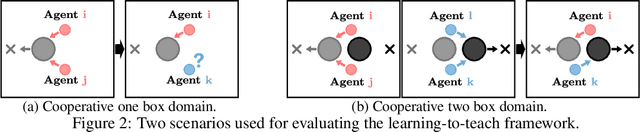

Heterogeneous knowledge naturally arises among different agents in cooperative multiagent reinforcement learning. As such, learning can be greatly improved if agents can effectively pass their knowledge on to other agents. Existing work has demonstrated that peer-to-peer knowledge transfer, a process referred to as action advising, improves team-wide learning. In contrast to previous frameworks that advise at the level of primitive actions, we aim to learn high-level teaching policies that decide when and what high-level action (e.g., sub-goal) to advise a teammate. We introduce a new learning to teach framework, called hierarchical multiagent teaching (HMAT). The proposed framework solves difficulties faced by prior work on multiagent teaching when operating in domains with long horizons, delayed rewards, and continuous states/actions by leveraging temporal abstraction and deep function approximation. Our empirical evaluations show that HMAT accelerates team-wide learning progress in difficult environments that are more complex than those explored in previous work. HMAT also learns teaching policies that can be transferred to different teammates/tasks and can even teach teammates with heterogeneous action spaces.
Deep Neural Network for Real-Time Autonomous Indoor Navigation
Nov 26, 2015
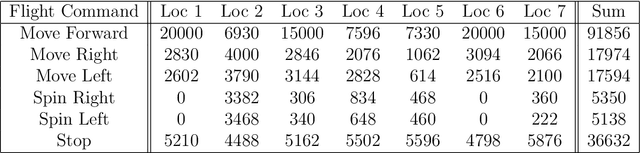
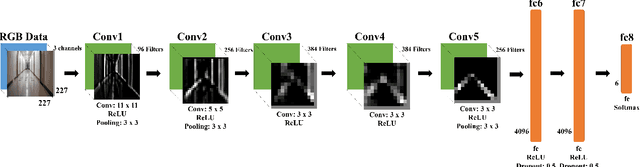
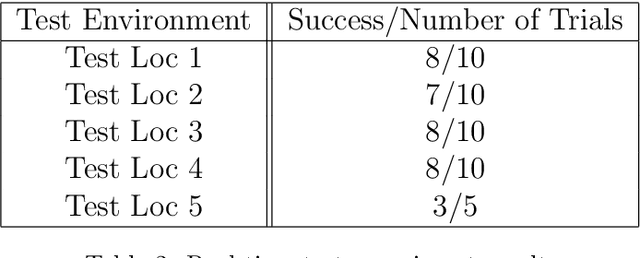
Autonomous indoor navigation of Micro Aerial Vehicles (MAVs) possesses many challenges. One main reason is that GPS has limited precision in indoor environments. The additional fact that MAVs are not able to carry heavy weight or power consuming sensors, such as range finders, makes indoor autonomous navigation a challenging task. In this paper, we propose a practical system in which a quadcopter autonomously navigates indoors and finds a specific target, i.e., a book bag, by using a single camera. A deep learning model, Convolutional Neural Network (ConvNet), is used to learn a controller strategy that mimics an expert pilot's choice of action. We show our system's performance through real-time experiments in diverse indoor locations. To understand more about our trained network, we use several visualization techniques.