 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Neural Network for Real-Time Autonomous Indoor Navigation
Paper and Code
Nov 26, 2015
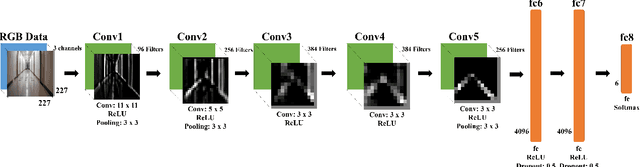
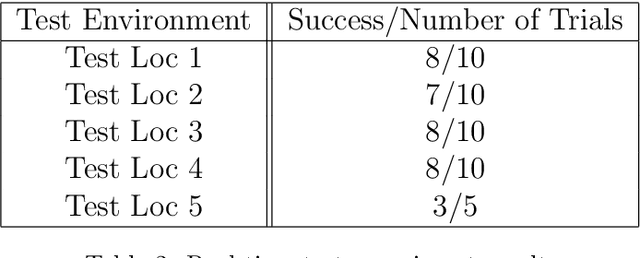
Autonomous indoor navigation of Micro Aerial Vehicles (MAVs) possesses many challenges. One main reason is that GPS has limited precision in indoor environments. The additional fact that MAVs are not able to carry heavy weight or power consuming sensors, such as range finders, makes indoor autonomous navigation a challenging task. In this paper, we propose a practical system in which a quadcopter autonomously navigates indoors and finds a specific target, i.e., a book bag, by using a single camera. A deep learning model, Convolutional Neural Network (ConvNet), is used to learn a controller strategy that mimics an expert pilot's choice of action. We show our system's performance through real-time experiments in diverse indoor locations. To understand more about our trained network, we use several visualization techniques.