 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Manipulation Potential and Haptic Estimation for Tool-Mediated Interaction
Mar 11, 2026Achieving human-level dexterity in contact-rich, tool-mediated manipulation remains a significant challenge due to visual occlusion and the underdetermined nature of haptic sensing. This paper introduces a parameterized Equilibrium Manifold (EM) as a unified representation for tool-mediated interaction, and develops a closed-loop framework that integrates haptic estimation, online planning, and adaptive stiffness control. We establish a physical-geometric duality using an adaptive manipulation potential incorporating a differentiable contact model, which induces the manifold's geometric structure and ensures that complex physical interactions are encapsulated as continuous operations on the EM. Within this framework, we reformulate haptic estimation as a manifold parameter estimation problem. Specifically, a hybrid inference strategy (haptic SLAM) is employed in which discrete object shapes are classified via particle filtering, while the continuous object pose is estimated using analytical gradients for efficient optimization. By continuously updating the parameters of the manipulation potential, the framework dynamically reshapes the induced EM to guide online trajectory replanning and implement uncertainty-aware impedance control, thereby closing the perception-action loop. The system is validated through simulation and over 260 real-world screw-loosening trials. Experimental results demonstrate robust identification and manipulation success in standard scenarios while maintaining accurate tracking. Furthermore, ablation studies confirm that haptic SLAM and uncertainty-aware stiffness modulation outperform fixed impedance baselines, effectively preventing jamming during tight tolerance interactions.
Estimation of Ground Reaction Forces from Kinematic Data during Locomotion
Feb 03, 2026Ground reaction forces (GRFs) provide fundamental insight into human gait mechanics and are widely used to assess joint loading, limb symmetry, balance control, and motor function. Despite their clinical relevance, the use of GRF remains underutilised in clinical workflows due to the practical limitations of force plate systems. In this work, we present a force-plate-free approach for estimating GRFs using only marker-based motion capture data. This kinematics only method to estimate and decompose GRF makes it well suited for widespread clinical depolyment. By using kinematics from sixteen body segments, we estimate the centre of mass (CoM) and compute GRFs, which are subsequently decomposed into individual components through a minimization-based approach. Through this framework, we can identify gait stance phases and provide access to clinically meaningful kinetic measures without a dedicated force plate system. Experimental results demonstrate the viability of CoM and GRF estimation based solely on kinematic data, supporting force-plate-free gait analysis.
Delay-Compensated Stiffness Estimation for Robot-Mediated Dyadic Interaction
Jan 25, 2026Robot-mediated human-human (dyadic) interactions enable therapists to provide physical therapy remotely, yet an accurate perception of patient stiffness remains challenging due to network-induced haptic delays. Conventional stiffness estimation methods, which neglect delay, suffer from temporal misalignment between force and position signals, leading to significant estimation errors as delays increase. To address this, we propose a robust, delay-compensated stiffness estimation framework by deriving an algebraic estimator based on quasi-static equilibrium that explicitly accounts for temporally aligning the expert's input with the novice's response. A Normalised Weighted Least Squares (NWLS) implementation is then introduced to robustly filter dynamic bias resulting from the algebraic derivation. Experiments using commercial rehabilitation robots (H-MAN) as the platform demonstrate that the proposed method significantly outperforms the standard estimator, maintaining consistent tracking accuracy under multiple introduced delays. These findings offer a promising solution for achieving high-fidelity haptic perception in remote dyadic interaction, potentially facilitating reliable stiffness assessment in therapeutic settings across networks.
Stability Criteria and Motor Performance in Delayed Haptic Dyadic Interactions Mediated by Robots
Oct 16, 2025This paper establishes analytical stability criteria for robot-mediated human-human (dyadic) interaction systems, focusing on haptic communication under network-induced time delays. Through frequency-domain analysis supported by numerical simulations, we identify both delay-independent and delay-dependent stability criteria. The delay-independent criterion guarantees stability irrespective of the delay, whereas the delay-dependent criterion is characterised by a maximum tolerable delay before instability occurs. The criteria demonstrate dependence on controller and robot dynamic parameters, where increasing stiffness reduces the maximum tolerable delay in a non-linear manner, thereby heightening system vulnerability. The proposed criteria can be generalised to a wide range of robot-mediated interactions and serve as design guidelines for stable remote dyadic systems. Experiments with robots performing human-like movements further illustrate the correlation between stability and motor performance. The findings of this paper suggest the prerequisites for effective delay-compensation strategies.
Haptic-based Complementary Filter for Rigid Body Rotations
Apr 20, 2025The non-commutative nature of 3D rotations poses well-known challenges in generalizing planar problems to three-dimensional ones, even more so in contact-rich tasks where haptic information (i.e., forces/torques) is involved. In this sense, not all learning-based algorithms that are currently available generalize to 3D orientation estimation. Non-linear filters defined on $\mathbf{\mathbb{SO}(3)}$ are widely used with inertial measurement sensors; however, none of them have been used with haptic measurements. This paper presents a unique complementary filtering framework that interprets the geometric shape of objects in the form of superquadrics, exploits the symmetry of $\mathbf{\mathbb{SO}(3)}$, and uses force and vision sensors as measurements to provide an estimate of orientation. The framework's robustness and almost global stability are substantiated by a set of experiments on a dual-arm robotic setup.
A Planning Framework for Stable Robust Multi-Contact Manipulation
Apr 03, 2025



While modeling multi-contact manipulation as a quasi-static mechanical process transitioning between different contact equilibria, we propose formulating it as a planning and optimization problem, explicitly evaluating (i) contact stability and (ii) robustness to sensor noise. Specifically, we conduct a comprehensive study on multi-manipulator control strategies, focusing on dual-arm execution in a planar peg-in-hole task and extending it to the Multi-Manipulator Multiple Peg-in-Hole (MMPiH) problem to explore increased task complexity. Our framework employs Dynamic Movement Primitives (DMPs) to parameterize desired trajectories and Black-Box Optimization (BBO) with a comprehensive cost function incorporating friction cone constraints, squeeze forces, and stability considerations. By integrating parallel scenario training, we enhance the robustness of the learned policies. To evaluate the friction cone cost in experiments, we test the optimal trajectories computed for various contact surfaces, i.e., with different coefficients of friction. The stability cost is analytical explained and tested its necessity in simulation. The robustness performance is quantified through variations of hole pose and chamfer size in simulation and experiment. Results demonstrate that our approach achieves consistently high success rates in both the single peg-in-hole and multiple peg-in-hole tasks, confirming its effectiveness and generalizability. The video can be found at https://youtu.be/IU0pdnSd4tE.
Sensorized gripper for human demonstrations
Mar 19, 2025



Ease of programming is a key factor in making robots ubiquitous in unstructured environments. In this work, we present a sensorized gripper built with off-the-shelf parts, used to record human demonstrations of a box in box assembly task. With very few trials of short interval timings each, we show that a robot can repeat the task successfully. We adopt a Cartesian approach to robot motion generation by computing the joint space solution while concurrently solving for the optimal robot position, to maximise manipulability. The statistics of the human demonstration are extracted using Gaussian Mixture Models (GMM) and the robot is commanded using impedance control.
Learning and generalization of robotic dual-arm manipulation of boxes from demonstrations via Gaussian Mixture Models (GMMs)
Mar 07, 2025Learning from demonstration (LfD) is an effective method to teach robots to move and manipulate objects in a human-like manner. This is especially true when dealing with complex robotic systems, such as those with dual arms employed for their improved payload capacity and manipulability. However, a key challenge is in expanding the robotic movements beyond the learned scenarios to adapt to minor and major variations from the specific demonstrations. In this work, we propose a learning and novel generalization approach that adapts the learned Gaussian Mixture Model (GMM)-parameterized policy derived from human demonstrations. Our method requires only a small number of human demonstrations and eliminates the need for a robotic system during the demonstration phase, which can significantly reduce both cost and time. The generalization process takes place directly in the parameter space, leveraging the lower-dimensional representation of GMM parameters. With only three parameters per Gaussian component, this process is computationally efficient and yields immediate results upon request. We validate our approach through real-world experiments involving a dual-arm robotic manipulation of boxes. Starting with just five demonstrations for a single task, our approach successfully generalizes to new unseen scenarios, including new target locations, orientations, and box sizes. These results highlight the practical applicability and scalability of our method for complex manipulations.
Path Planning in Complex Environments with Superquadrics and Voronoi-Based Orientation
Nov 08, 2024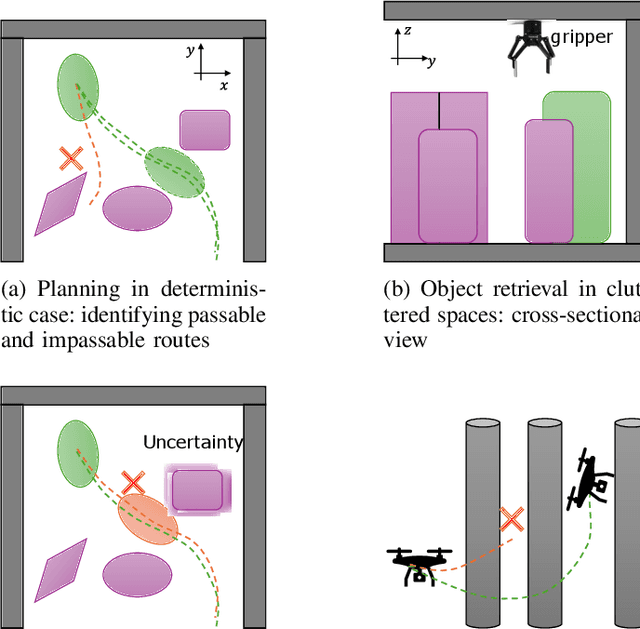
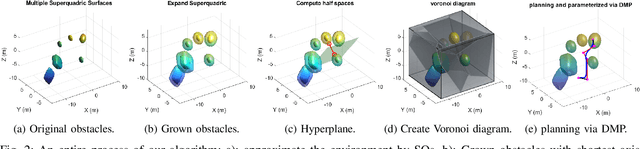
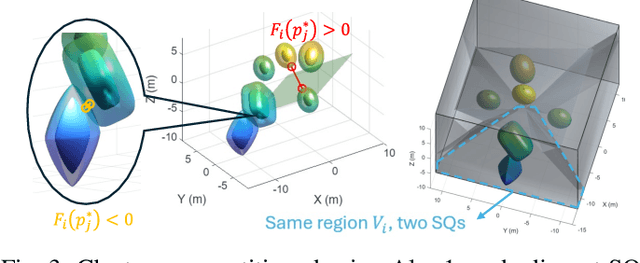
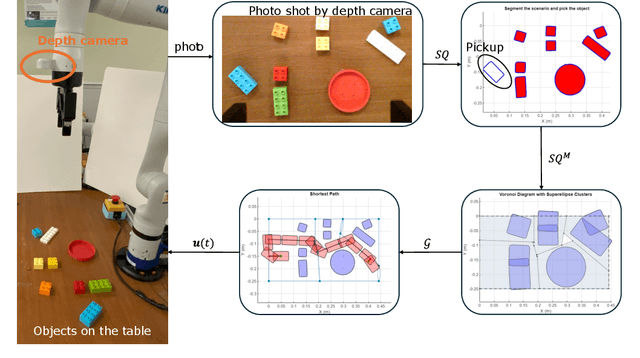
Path planning in narrow passages is a challenging problem in various applications. Traditional planning algorithms often face challenges in complex environments like mazes and traps, where narrow entrances require special orientation control for successful navigation. In this work, we present a novel approach that combines superquadrics (SQ) representation and Voronoi diagrams to solve the narrow passage problem in both 2D and 3D environment. Our method utilizes the SQ formulation to expand obstacles, eliminating impassable passages, while Voronoi hyperplane ensures maximum clearance path. Additionally, the hyperplane provides a natural reference for robot orientation, aligning its long axis with the passage direction. We validate our framework through a 2D object retrieval task and 3D drone simulation, demonstrating that our approach outperforms classical planners and a cutting-edge drone planner by ensuring passable trajectories with maximum clearance.
Planning for quasi-static manipulation tasks via an intrinsic haptic metric
Nov 07, 2024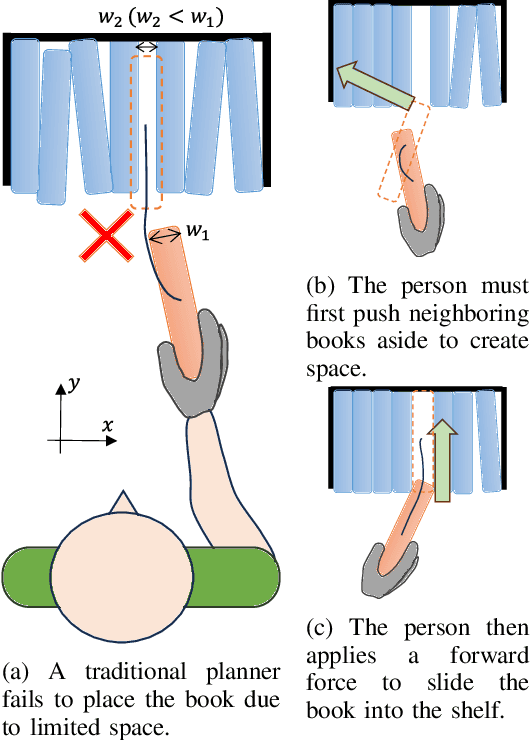
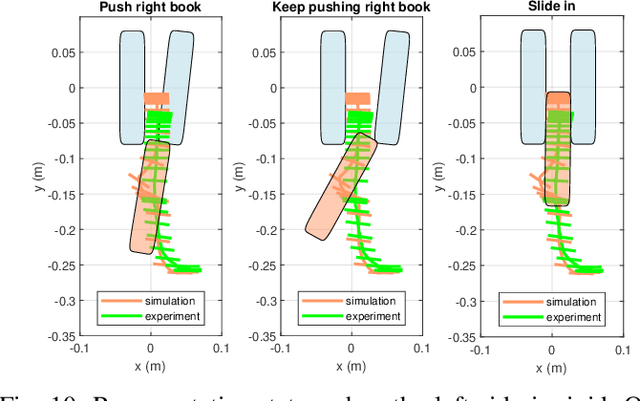
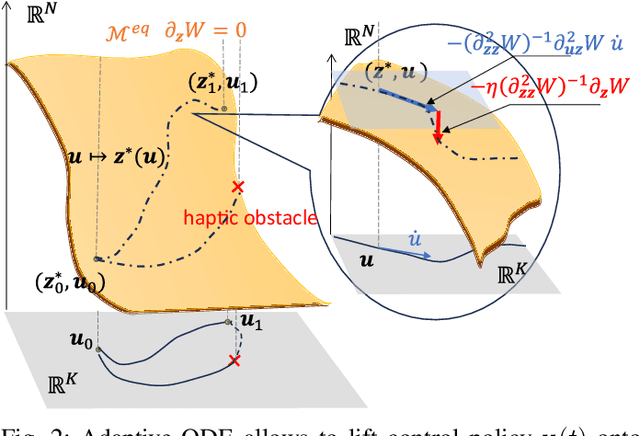
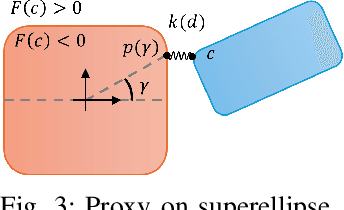
Contact-rich manipulation often requires strategic interactions with objects, such as pushing to accomplish specific tasks. We propose a novel scenario where a robot inserts a book into a crowded shelf by pushing aside neighboring books to create space before slotting the new book into place. Classical planning algorithms fail in this context due to limited space and their tendency to avoid contact. Additionally, they do not handle indirectly manipulable objects or consider force interactions. Our key contributions are: i) re-framing quasi-static manipulation as a planning problem on an implicit manifold derived from equilibrium conditions; ii) utilizing an intrinsic haptic metric instead of ad-hoc cost functions; and iii) proposing an adaptive algorithm that simultaneously updates robot states, object positions, contact points, and haptic distances. We evaluate our method on such crowded bookshelf insertion task but it is a general formulation to rigid bodies manipulation tasks. We propose proxies to capture contact point and force, with superellipse to represent objects. This simplified model guarantee the differentiablity. Our framework autonomously discovers strategic wedging-in policies while our simplified contact model achieves behavior similar to real world scenarios. We also vary the stiffness and initial positions to analysis our framework comprehensively. The video can be found at https://youtu.be/eab8umZ3AQ0.