 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning for quasi-static manipulation tasks via an intrinsic haptic metric
Paper and Code
Nov 07, 2024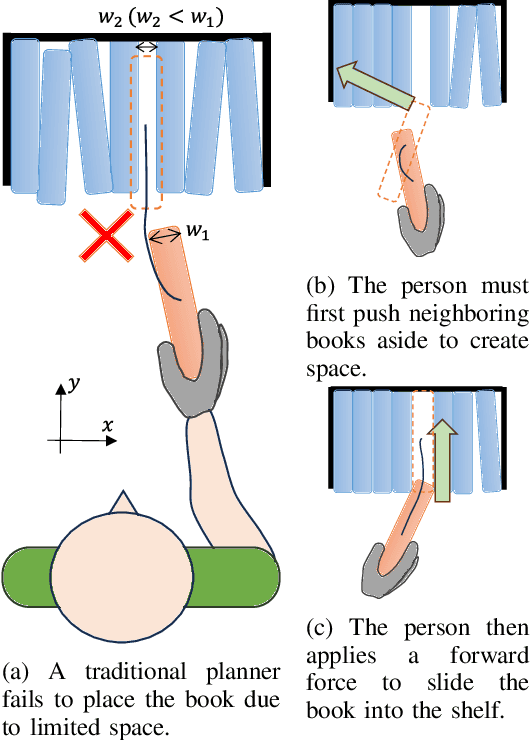
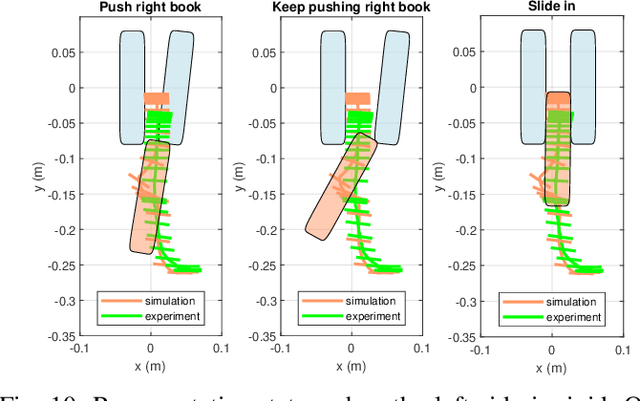
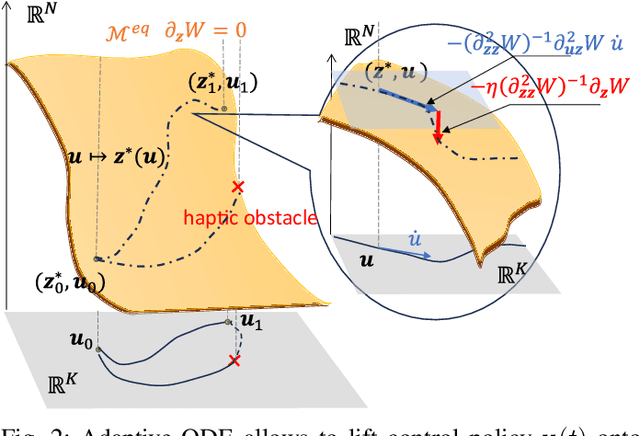
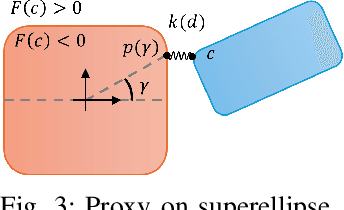
Contact-rich manipulation often requires strategic interactions with objects, such as pushing to accomplish specific tasks. We propose a novel scenario where a robot inserts a book into a crowded shelf by pushing aside neighboring books to create space before slotting the new book into place. Classical planning algorithms fail in this context due to limited space and their tendency to avoid contact. Additionally, they do not handle indirectly manipulable objects or consider force interactions. Our key contributions are: i) re-framing quasi-static manipulation as a planning problem on an implicit manifold derived from equilibrium conditions; ii) utilizing an intrinsic haptic metric instead of ad-hoc cost functions; and iii) proposing an adaptive algorithm that simultaneously updates robot states, object positions, contact points, and haptic distances. We evaluate our method on such crowded bookshelf insertion task but it is a general formulation to rigid bodies manipulation tasks. We propose proxies to capture contact point and force, with superellipse to represent objects. This simplified model guarantee the differentiablity. Our framework autonomously discovers strategic wedging-in policies while our simplified contact model achieves behavior similar to real world scenarios. We also vary the stiffness and initial positions to analysis our framework comprehensively. The video can be found at https://youtu.be/eab8umZ3AQ0.