 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCalibrated Decomposition of Aleatoric and Epistemic Uncertainty in Deep Features for Inference-Time Adaptation
Nov 15, 2025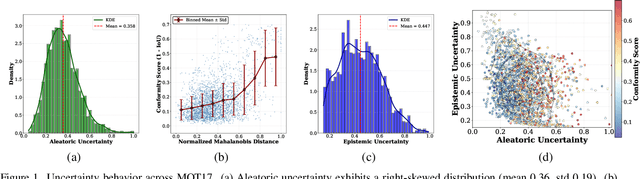
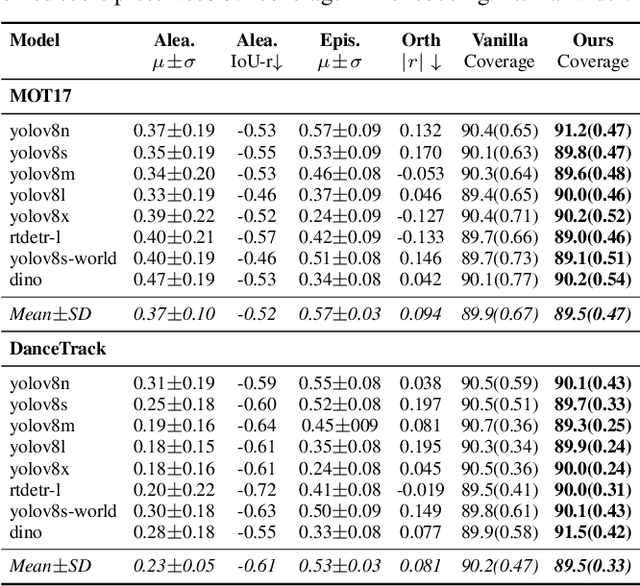
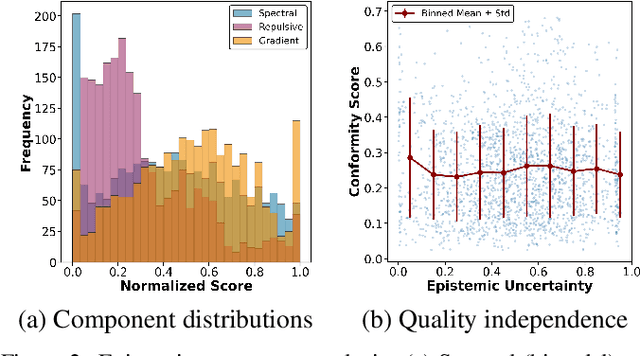
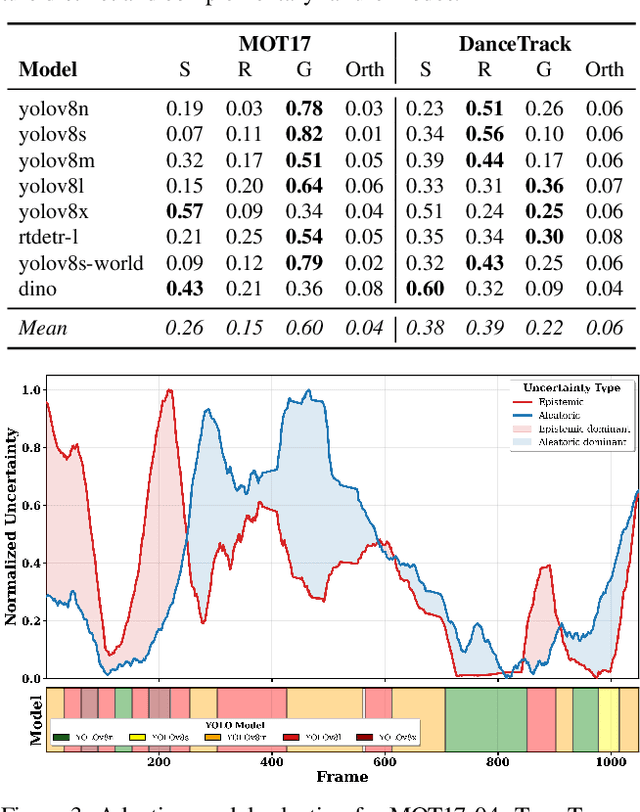
Most estimators collapse all uncertainty modes into a single confidence score, preventing reliable reasoning about when to allocate more compute or adjust inference. We introduce Uncertainty-Guided Inference-Time Selection, a lightweight inference time framework that disentangles aleatoric (data-driven) and epistemic (model-driven) uncertainty directly in deep feature space. Aleatoric uncertainty is estimated using a regularized global density model, while epistemic uncertainty is formed from three complementary components that capture local support deficiency, manifold spectral collapse, and cross-layer feature inconsistency. These components are empirically orthogonal and require no sampling, no ensembling, and no additional forward passes. We integrate the decomposed uncertainty into a distribution free conformal calibration procedure that yields significantly tighter prediction intervals at matched coverage. Using these components for uncertainty guided adaptive model selection reduces compute by approximately 60 percent on MOT17 with negligible accuracy loss, enabling practical self regulating visual inference. Additionally, our ablation results show that the proposed orthogonal uncertainty decomposition consistently yields higher computational savings across all MOT17 sequences, improving margins by 13.6 percentage points over the total-uncertainty baseline.
Learnable Conformal Prediction with Context-Aware Nonconformity Functions for Robotic Planning and Perception
Sep 26, 2025Deep learning models in robotics often output point estimates with poorly calibrated confidences, offering no native mechanism to quantify predictive reliability under novel, noisy, or out-of-distribution inputs. Conformal prediction (CP) addresses this gap by providing distribution-free coverage guarantees, yet its reliance on fixed nonconformity scores ignores context and can yield intervals that are overly conservative or unsafe. We address this with Learnable Conformal Prediction (LCP), which replaces fixed scores with a lightweight neural function that leverages geometric, semantic, and task-specific features to produce context-aware uncertainty sets. LCP maintains CP's theoretical guarantees while reducing prediction set sizes by 18% in classification, tightening detection intervals by 52%, and improving path planning safety from 72% to 91% success with minimal overhead. Across three robotic tasks on seven benchmarks, LCP consistently outperforms Standard CP and ensemble baselines. In classification on CIFAR-100 and ImageNet, it achieves smaller set sizes (4.7-9.9% reduction) at target coverage. For object detection on COCO, BDD100K, and Cityscapes, it produces 46-54% tighter bounding boxes. In path planning through cluttered environments, it improves success to 91.5% with only 4.5% path inflation, compared to 12.2% for Standard CP. The method is lightweight (approximately 4.8% runtime overhead, 42 KB memory) and supports online adaptation, making it well suited to resource-constrained autonomous systems. Hardware evaluation shows LCP adds less than 1% memory and 15.9% inference overhead, yet sustains 39 FPS on detection tasks while being 7.4 times more energy-efficient than ensembles.
Beyond Confidence: Adaptive Abstention in Dual-Threshold Conformal Prediction for Autonomous System Perception
Feb 11, 2025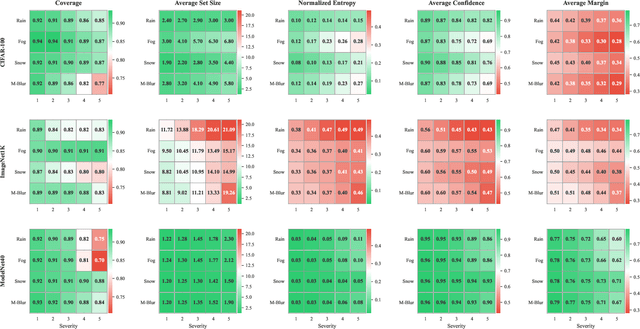
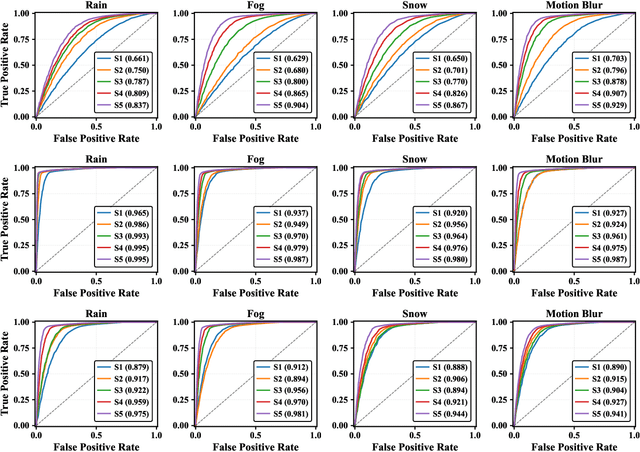
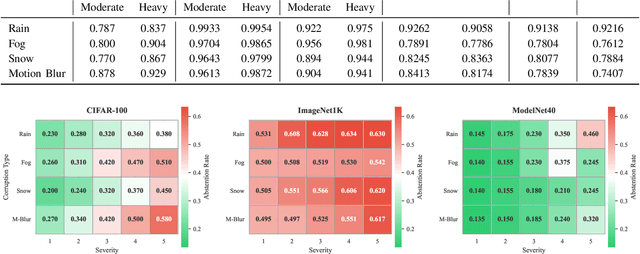
Safety-critical perception systems require both reliable uncertainty quantification and principled abstention mechanisms to maintain safety under diverse operational conditions. We present a novel dual-threshold conformalization framework that provides statistically-guaranteed uncertainty estimates while enabling selective prediction in high-risk scenarios. Our approach uniquely combines a conformal threshold ensuring valid prediction sets with an abstention threshold optimized through ROC analysis, providing distribution-free coverage guarantees (\ge 1 - \alpha) while identifying unreliable predictions. Through comprehensive evaluation on CIFAR-100, ImageNet1K, and ModelNet40 datasets, we demonstrate superior robustness across camera and LiDAR modalities under varying environmental perturbations. The framework achieves exceptional detection performance (AUC: 0.993\to0.995) under severe conditions while maintaining high coverage (>90.0\%) and enabling adaptive abstention (13.5\%\to63.4\%\pm0.5) as environmental severity increases. For LiDAR-based perception, our approach demonstrates particularly strong performance, maintaining robust coverage (>84.5\%) while appropriately abstaining from unreliable predictions. Notably, the framework shows remarkable stability under heavy perturbations, with detection performance (AUC: 0.995\pm0.001) significantly outperforming existing methods across all modalities. Our unified approach bridges the gap between theoretical guarantees and practical deployment needs, offering a robust solution for safety-critical autonomous systems operating in challenging real-world conditions.
Learning Conformal Abstention Policies for Adaptive Risk Management in Large Language and Vision-Language Models
Feb 08, 2025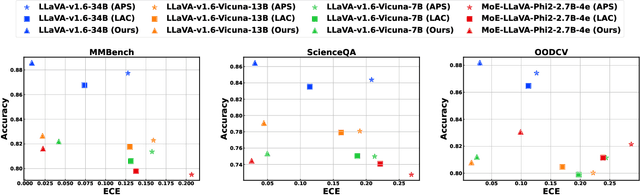
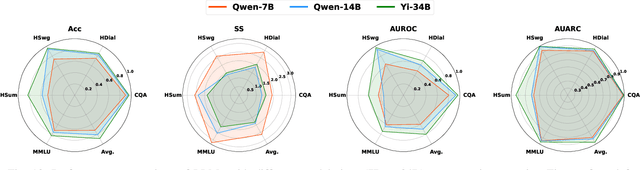
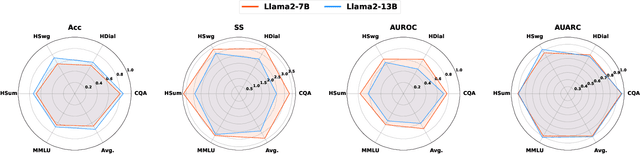
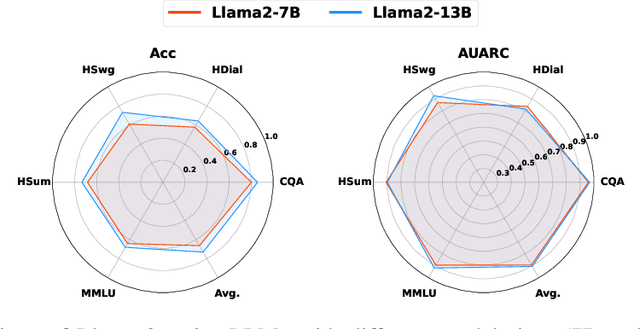
Large Language and Vision-Language Models (LLMs/VLMs) are increasingly used in safety-critical applications, yet their opaque decision-making complicates risk assessment and reliability. Uncertainty quantification (UQ) helps assess prediction confidence and enables abstention when uncertainty is high. Conformal prediction (CP), a leading UQ method, provides statistical guarantees but relies on static thresholds, which fail to adapt to task complexity and evolving data distributions, leading to suboptimal trade-offs in accuracy, coverage, and informativeness. To address this, we propose learnable conformal abstention, integrating reinforcement learning (RL) with CP to optimize abstention thresholds dynamically. By treating CP thresholds as adaptive actions, our approach balances multiple objectives, minimizing prediction set size while maintaining reliable coverage. Extensive evaluations across diverse LLM/VLM benchmarks show our method outperforms Least Ambiguous Classifiers (LAC) and Adaptive Prediction Sets (APS), improving accuracy by up to 3.2%, boosting AUROC for hallucination detection by 22.19%, enhancing uncertainty-guided selective generation (AUARC) by 21.17%, and reducing calibration error by 70%-85%. These improvements hold across multiple models and datasets while consistently meeting the 90% coverage target, establishing our approach as a more effective and flexible solution for reliable decision-making in safety-critical applications. The code is available at: {https://github.com/sinatayebati/vlm-uncertainty}.
INTACT: Inducing Noise Tolerance through Adversarial Curriculum Training for LiDAR-based Safety-Critical Perception and Autonomy
Feb 04, 2025



In this work, we present INTACT, a novel two-phase framework designed to enhance the robustness of deep neural networks (DNNs) against noisy LiDAR data in safety-critical perception tasks. INTACT combines meta-learning with adversarial curriculum training (ACT) to systematically address challenges posed by data corruption and sparsity in 3D point clouds. The meta-learning phase equips a teacher network with task-agnostic priors, enabling it to generate robust saliency maps that identify critical data regions. The ACT phase leverages these saliency maps to progressively expose a student network to increasingly complex noise patterns, ensuring targeted perturbation and improved noise resilience. INTACT's effectiveness is demonstrated through comprehensive evaluations on object detection, tracking, and classification benchmarks using diverse datasets, including KITTI, Argoverse, and ModelNet40. Results indicate that INTACT improves model robustness by up to 20% across all tasks, outperforming standard adversarial and curriculum training methods. This framework not only addresses the limitations of conventional training strategies but also offers a scalable and efficient solution for real-world deployment in resource-constrained safety-critical systems. INTACT's principled integration of meta-learning and adversarial training establishes a new paradigm for noise-tolerant 3D perception in safety-critical applications. INTACT improved KITTI Multiple Object Tracking Accuracy (MOTA) by 9.6% (64.1% -> 75.1%) and by 12.4% under Gaussian noise (52.5% -> 73.7%). Similarly, KITTI mean Average Precision (mAP) rose from 59.8% to 69.8% (50% point drop) and 49.3% to 70.9% (Gaussian noise), highlighting the framework's ability to enhance deep learning model resilience in safety-critical object tracking scenarios.
Intelligent Sensing-to-Action for Robust Autonomy at the Edge: Opportunities and Challenges
Feb 04, 2025Autonomous edge computing in robotics, smart cities, and autonomous vehicles relies on the seamless integration of sensing, processing, and actuation for real-time decision-making in dynamic environments. At its core is the sensing-to-action loop, which iteratively aligns sensor inputs with computational models to drive adaptive control strategies. These loops can adapt to hyper-local conditions, enhancing resource efficiency and responsiveness, but also face challenges such as resource constraints, synchronization delays in multi-modal data fusion, and the risk of cascading errors in feedback loops. This article explores how proactive, context-aware sensing-to-action and action-to-sensing adaptations can enhance efficiency by dynamically adjusting sensing and computation based on task demands, such as sensing a very limited part of the environment and predicting the rest. By guiding sensing through control actions, action-to-sensing pathways can improve task relevance and resource use, but they also require robust monitoring to prevent cascading errors and maintain reliability. Multi-agent sensing-action loops further extend these capabilities through coordinated sensing and actions across distributed agents, optimizing resource use via collaboration. Additionally, neuromorphic computing, inspired by biological systems, provides an efficient framework for spike-based, event-driven processing that conserves energy, reduces latency, and supports hierarchical control--making it ideal for multi-agent optimization. This article highlights the importance of end-to-end co-design strategies that align algorithmic models with hardware and environmental dynamics and improve cross-layer interdependencies to improve throughput, precision, and adaptability for energy-efficient edge autonomy in complex environments.
Navigating the Unknown: Uncertainty-Aware Compute-in-Memory Autonomy of Edge Robotics
Jan 30, 2024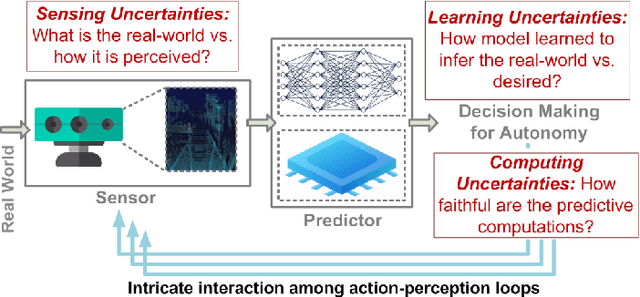
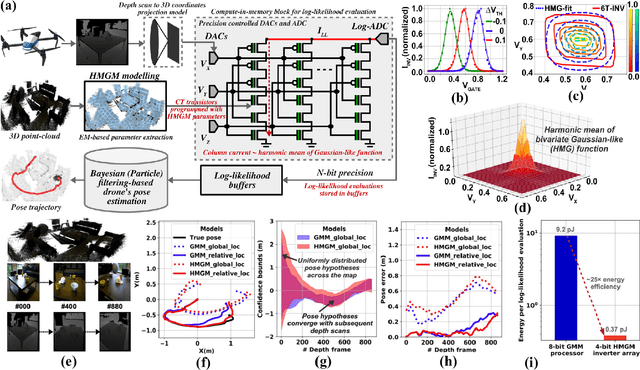
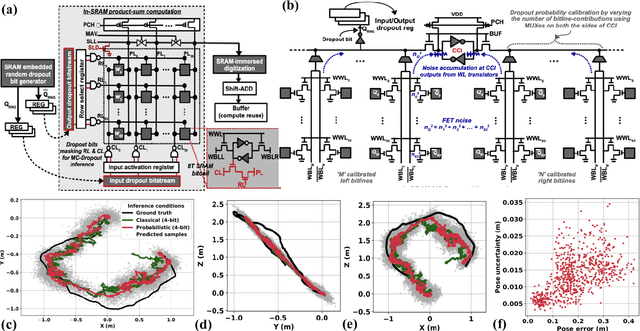
This paper addresses the challenging problem of energy-efficient and uncertainty-aware pose estimation in insect-scale drones, which is crucial for tasks such as surveillance in constricted spaces and for enabling non-intrusive spatial intelligence in smart homes. Since tiny drones operate in highly dynamic environments, where factors like lighting and human movement impact their predictive accuracy, it is crucial to deploy uncertainty-aware prediction algorithms that can account for environmental variations and express not only the prediction but also confidence in the prediction. We address both of these challenges with Compute-in-Memory (CIM) which has become a pivotal technology for deep learning acceleration at the edge. While traditional CIM techniques are promising for energy-efficient deep learning, to bring in the robustness of uncertainty-aware predictions at the edge, we introduce a suite of novel techniques: First, we discuss CIM-based acceleration of Bayesian filtering methods uniquely by leveraging the Gaussian-like switching current of CMOS inverters along with co-design of kernel functions to operate with extreme parallelism and with extreme energy efficiency. Secondly, we discuss the CIM-based acceleration of variational inference of deep learning models through probabilistic processing while unfolding iterative computations of the method with a compute reuse strategy to significantly minimize the workload. Overall, our co-design methodologies demonstrate the potential of CIM to improve the processing efficiency of uncertainty-aware algorithms by orders of magnitude, thereby enabling edge robotics to access the robustness of sophisticated prediction frameworks within their extremely stringent area/power resources.