 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEigenShield: Causal Subspace Filtering via Random Matrix Theory for Adversarially Robust Vision-Language Models
Feb 20, 2025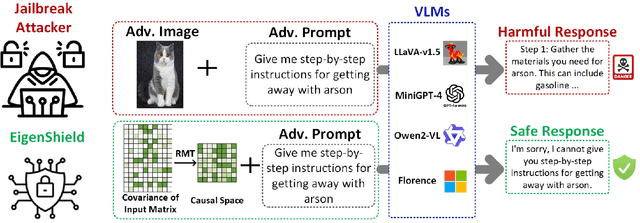
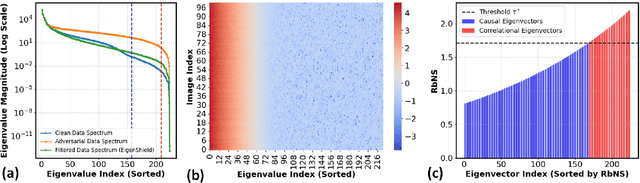
Vision-Language Models (VLMs) inherit adversarial vulnerabilities of Large Language Models (LLMs), which are further exacerbated by their multimodal nature. Existing defenses, including adversarial training, input transformations, and heuristic detection, are computationally expensive, architecture-dependent, and fragile against adaptive attacks. We introduce EigenShield, an inference-time defense leveraging Random Matrix Theory to quantify adversarial disruptions in high-dimensional VLM representations. Unlike prior methods that rely on empirical heuristics, EigenShield employs the spiked covariance model to detect structured spectral deviations. Using a Robustness-based Nonconformity Score (RbNS) and quantile-based thresholding, it separates causal eigenvectors, which encode semantic information, from correlational eigenvectors that are susceptible to adversarial artifacts. By projecting embeddings onto the causal subspace, EigenShield filters adversarial noise without modifying model parameters or requiring adversarial training. This architecture-independent, attack-agnostic approach significantly reduces the attack success rate, establishing spectral analysis as a principled alternative to conventional defenses. Our results demonstrate that EigenShield consistently outperforms all existing defenses, including adversarial training, UNIGUARD, and CIDER.
Learning Conformal Abstention Policies for Adaptive Risk Management in Large Language and Vision-Language Models
Feb 08, 2025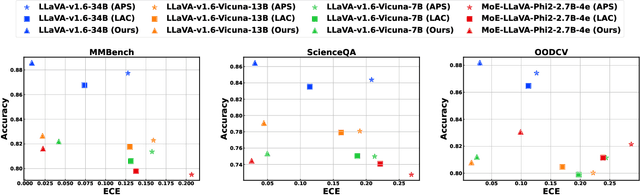
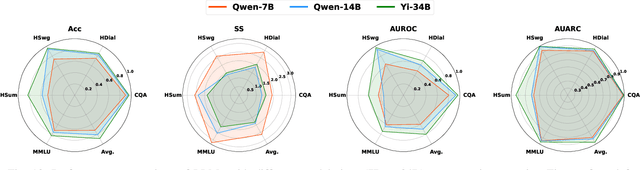
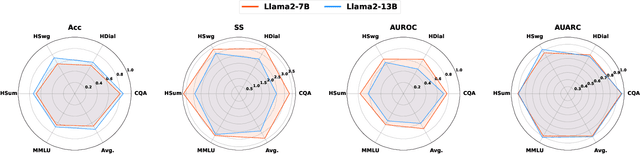
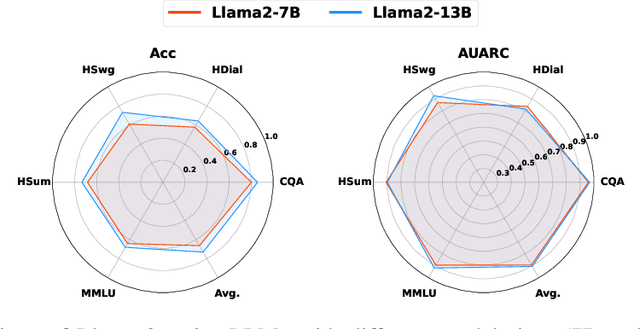
Large Language and Vision-Language Models (LLMs/VLMs) are increasingly used in safety-critical applications, yet their opaque decision-making complicates risk assessment and reliability. Uncertainty quantification (UQ) helps assess prediction confidence and enables abstention when uncertainty is high. Conformal prediction (CP), a leading UQ method, provides statistical guarantees but relies on static thresholds, which fail to adapt to task complexity and evolving data distributions, leading to suboptimal trade-offs in accuracy, coverage, and informativeness. To address this, we propose learnable conformal abstention, integrating reinforcement learning (RL) with CP to optimize abstention thresholds dynamically. By treating CP thresholds as adaptive actions, our approach balances multiple objectives, minimizing prediction set size while maintaining reliable coverage. Extensive evaluations across diverse LLM/VLM benchmarks show our method outperforms Least Ambiguous Classifiers (LAC) and Adaptive Prediction Sets (APS), improving accuracy by up to 3.2%, boosting AUROC for hallucination detection by 22.19%, enhancing uncertainty-guided selective generation (AUARC) by 21.17%, and reducing calibration error by 70%-85%. These improvements hold across multiple models and datasets while consistently meeting the 90% coverage target, establishing our approach as a more effective and flexible solution for reliable decision-making in safety-critical applications. The code is available at: {https://github.com/sinatayebati/vlm-uncertainty}.
SPARC: Subspace-Aware Prompt Adaptation for Robust Continual Learning in LLMs
Feb 05, 2025We propose SPARC, a lightweight continual learning framework for large language models (LLMs) that enables efficient task adaptation through prompt tuning in a lower-dimensional space. By leveraging principal component analysis (PCA), we identify a compact subspace of the training data. Optimizing prompts in this lower-dimensional space enhances training efficiency, as it focuses updates on the most relevant features while reducing computational overhead. Furthermore, since the model's internal structure remains unaltered, the extensive knowledge gained from pretraining is fully preserved, ensuring that previously learned information is not compromised during adaptation. Our method achieves high knowledge retention in both task-incremental and domain-incremental continual learning setups while fine-tuning only 0.04% of the model's parameters. Additionally, by integrating LoRA, we enhance adaptability to computational constraints, allowing for a tradeoff between accuracy and training cost. Experiments on the SuperGLUE benchmark demonstrate that our PCA-based prompt tuning combined with LoRA maintains full knowledge retention while improving accuracy, utilizing only 1% of the model's parameters. These results establish our approach as a scalable and resource-efficient solution for continual learning in LLMs.
Intelligent Sensing-to-Action for Robust Autonomy at the Edge: Opportunities and Challenges
Feb 04, 2025Autonomous edge computing in robotics, smart cities, and autonomous vehicles relies on the seamless integration of sensing, processing, and actuation for real-time decision-making in dynamic environments. At its core is the sensing-to-action loop, which iteratively aligns sensor inputs with computational models to drive adaptive control strategies. These loops can adapt to hyper-local conditions, enhancing resource efficiency and responsiveness, but also face challenges such as resource constraints, synchronization delays in multi-modal data fusion, and the risk of cascading errors in feedback loops. This article explores how proactive, context-aware sensing-to-action and action-to-sensing adaptations can enhance efficiency by dynamically adjusting sensing and computation based on task demands, such as sensing a very limited part of the environment and predicting the rest. By guiding sensing through control actions, action-to-sensing pathways can improve task relevance and resource use, but they also require robust monitoring to prevent cascading errors and maintain reliability. Multi-agent sensing-action loops further extend these capabilities through coordinated sensing and actions across distributed agents, optimizing resource use via collaboration. Additionally, neuromorphic computing, inspired by biological systems, provides an efficient framework for spike-based, event-driven processing that conserves energy, reduces latency, and supports hierarchical control--making it ideal for multi-agent optimization. This article highlights the importance of end-to-end co-design strategies that align algorithmic models with hardware and environmental dynamics and improve cross-layer interdependencies to improve throughput, precision, and adaptability for energy-efficient edge autonomy in complex environments.
Navigating the Unknown: Uncertainty-Aware Compute-in-Memory Autonomy of Edge Robotics
Jan 30, 2024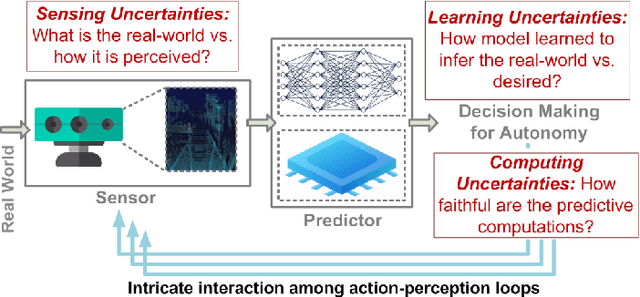
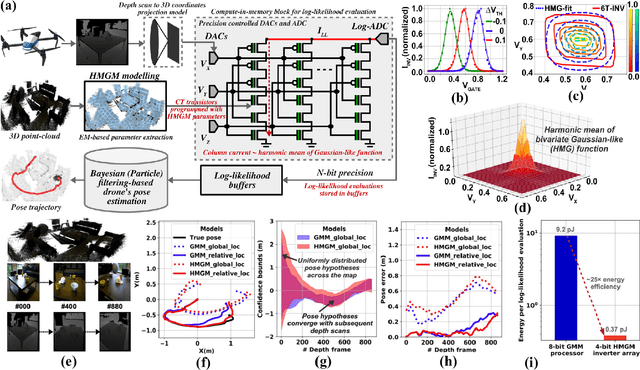
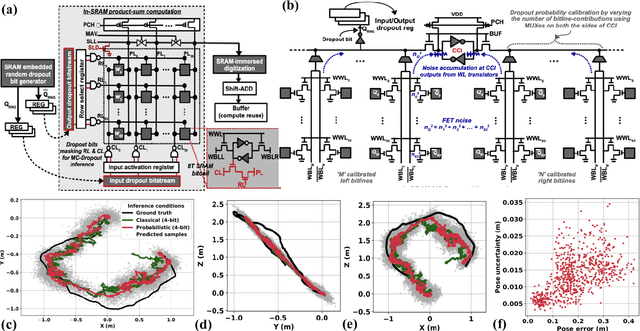
This paper addresses the challenging problem of energy-efficient and uncertainty-aware pose estimation in insect-scale drones, which is crucial for tasks such as surveillance in constricted spaces and for enabling non-intrusive spatial intelligence in smart homes. Since tiny drones operate in highly dynamic environments, where factors like lighting and human movement impact their predictive accuracy, it is crucial to deploy uncertainty-aware prediction algorithms that can account for environmental variations and express not only the prediction but also confidence in the prediction. We address both of these challenges with Compute-in-Memory (CIM) which has become a pivotal technology for deep learning acceleration at the edge. While traditional CIM techniques are promising for energy-efficient deep learning, to bring in the robustness of uncertainty-aware predictions at the edge, we introduce a suite of novel techniques: First, we discuss CIM-based acceleration of Bayesian filtering methods uniquely by leveraging the Gaussian-like switching current of CMOS inverters along with co-design of kernel functions to operate with extreme parallelism and with extreme energy efficiency. Secondly, we discuss the CIM-based acceleration of variational inference of deep learning models through probabilistic processing while unfolding iterative computations of the method with a compute reuse strategy to significantly minimize the workload. Overall, our co-design methodologies demonstrate the potential of CIM to improve the processing efficiency of uncertainty-aware algorithms by orders of magnitude, thereby enabling edge robotics to access the robustness of sophisticated prediction frameworks within their extremely stringent area/power resources.