 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAchieving Meaningful Collaboration: Worker-centered Design of a Physical Human-Robot Collaborative Blending Task
Oct 14, 2025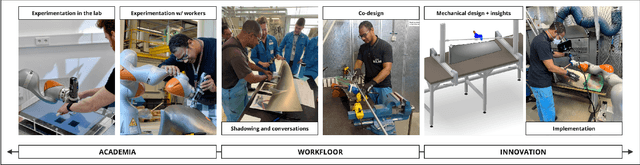
The use of robots in industrial settings continues to grow, driven by the need to address complex societal challenges such as labor shortages, aging populations, and ever-increasing production demands. In this abstract, we advocate for (and demonstrate) a transdisciplinary approach when considering robotics in the workplace. Transdisciplinarity emphasizes the integration of academic research with pragmatic expertise and embodied experiential knowledge, that prioritize values such as worker wellbeing and job attractiveness. In the following, we describe an ongoing multi-pronged effort to explore the potential of collaborative robots in the context of airplane engine repair and maintenance operations.
Meaningful human control over AI systems: beyond talking the talk
Nov 25, 2021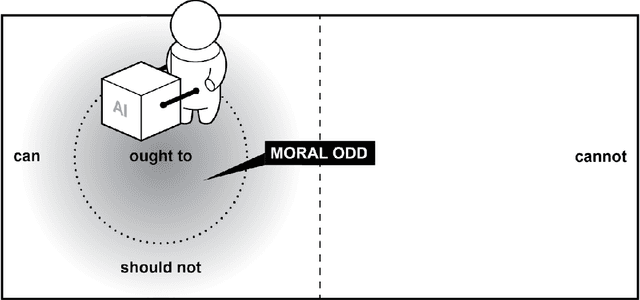
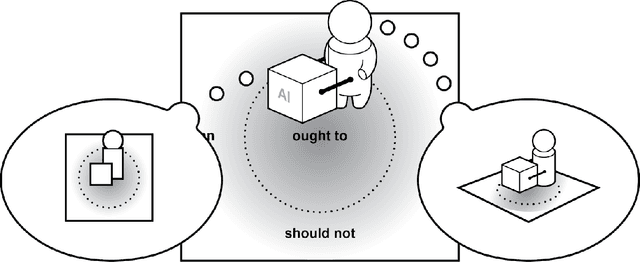
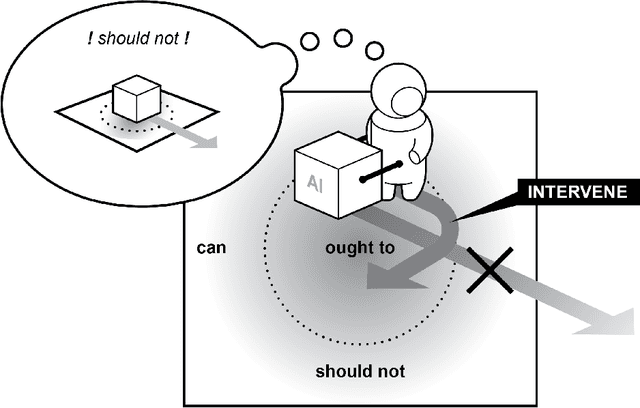
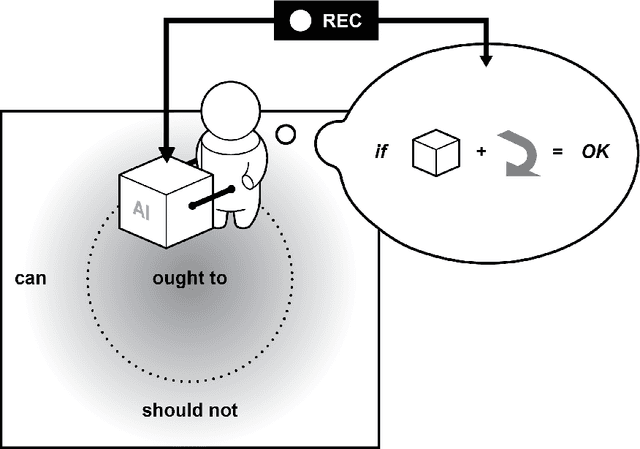
The concept of meaningful human control has been proposed to address responsibility gaps and mitigate them by establishing conditions that enable a proper attribution of responsibility for humans (e.g., users, designers and developers, manufacturers, legislators). However, the relevant discussions around meaningful human control have so far not resulted in clear requirements for researchers, designers, and engineers. As a result, there is no consensus on how to assess whether a designed AI system is under meaningful human control, making the practical development of AI-based systems that remain under meaningful human control challenging. In this paper, we address the gap between philosophical theory and engineering practice by identifying four actionable properties which AI-based systems must have to be under meaningful human control. First, a system in which humans and AI algorithms interact should have an explicitly defined domain of morally loaded situations within which the system ought to operate. Second, humans and AI agents within the system should have appropriate and mutually compatible representations. Third, responsibility attributed to a human should be commensurate with that human's ability and authority to control the system. Fourth, there should be explicit links between the actions of the AI agents and actions of humans who are aware of their moral responsibility. We argue these four properties are necessary for AI systems under meaningful human control, and provide possible directions to incorporate them into practice. We illustrate these properties with two use cases, automated vehicle and AI-based hiring. We believe these four properties will support practically-minded professionals to take concrete steps toward designing and engineering for AI systems that facilitate meaningful human control and responsibility.
Deep Active Object Recognition by Joint Label and Action Prediction
Dec 17, 2015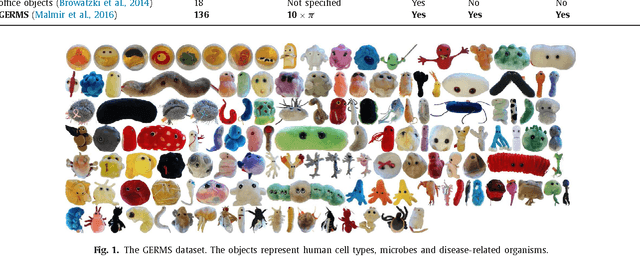
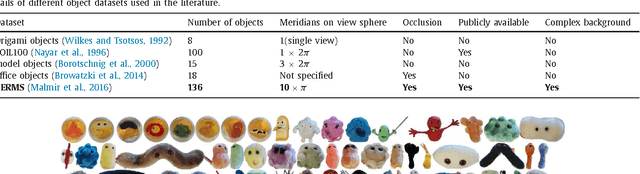
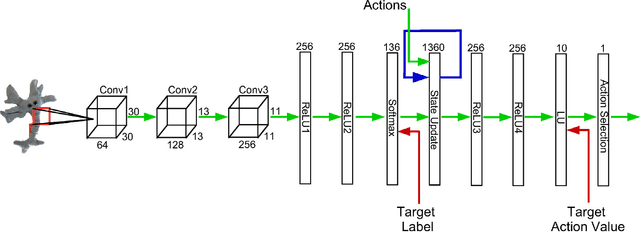
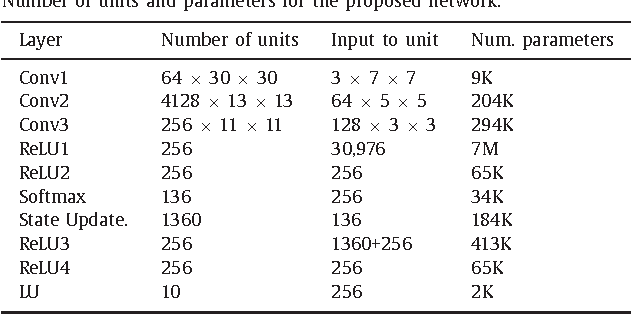
An active object recognition system has the advantage of being able to act in the environment to capture images that are more suited for training and that lead to better performance at test time. In this paper, we propose a deep convolutional neural network for active object recognition that simultaneously predicts the object label, and selects the next action to perform on the object with the aim of improving recognition performance. We treat active object recognition as a reinforcement learning problem and derive the cost function to train the network for joint prediction of the object label and the action. A generative model of object similarities based on the Dirichlet distribution is proposed and embedded in the network for encoding the state of the system. The training is carried out by simultaneously minimizing the label and action prediction errors using gradient descent. We empirically show that the proposed network is able to predict both the object label and the actions on GERMS, a dataset for active object recognition. We compare the test label prediction accuracy of the proposed model with Dirichlet and Naive Bayes state encoding. The results of experiments suggest that the proposed model equipped with Dirichlet state encoding is superior in performance, and selects images that lead to better training and higher accuracy of label prediction at test time.